

目 录
摘要……………………………………………………1
前言……………………………………………………1
1 倒立摆系统 …………………………………………3
1.1 倒立摆的简介……………………………………3
1.2 倒立摆系统的研究意义和目的……………………4
1.2.1 倒立摆系统在数学模型的基础上的分析………4
1.2.2 倒立摆系统是不稳定的系统……………………4
1.2.3 倒立摆系统控制方法……………………………4
2 PID 控制 ……………………………………………5
2.1 PID 控制的简述 …………………………………5
2.2 国内外的研究现状和发展趋势 …………………5
2.3 PID 控制器的结构 ………………………………6
3 单级倒立摆的数学模………………………………7
3.1 模型的推导原理 …………………………………7
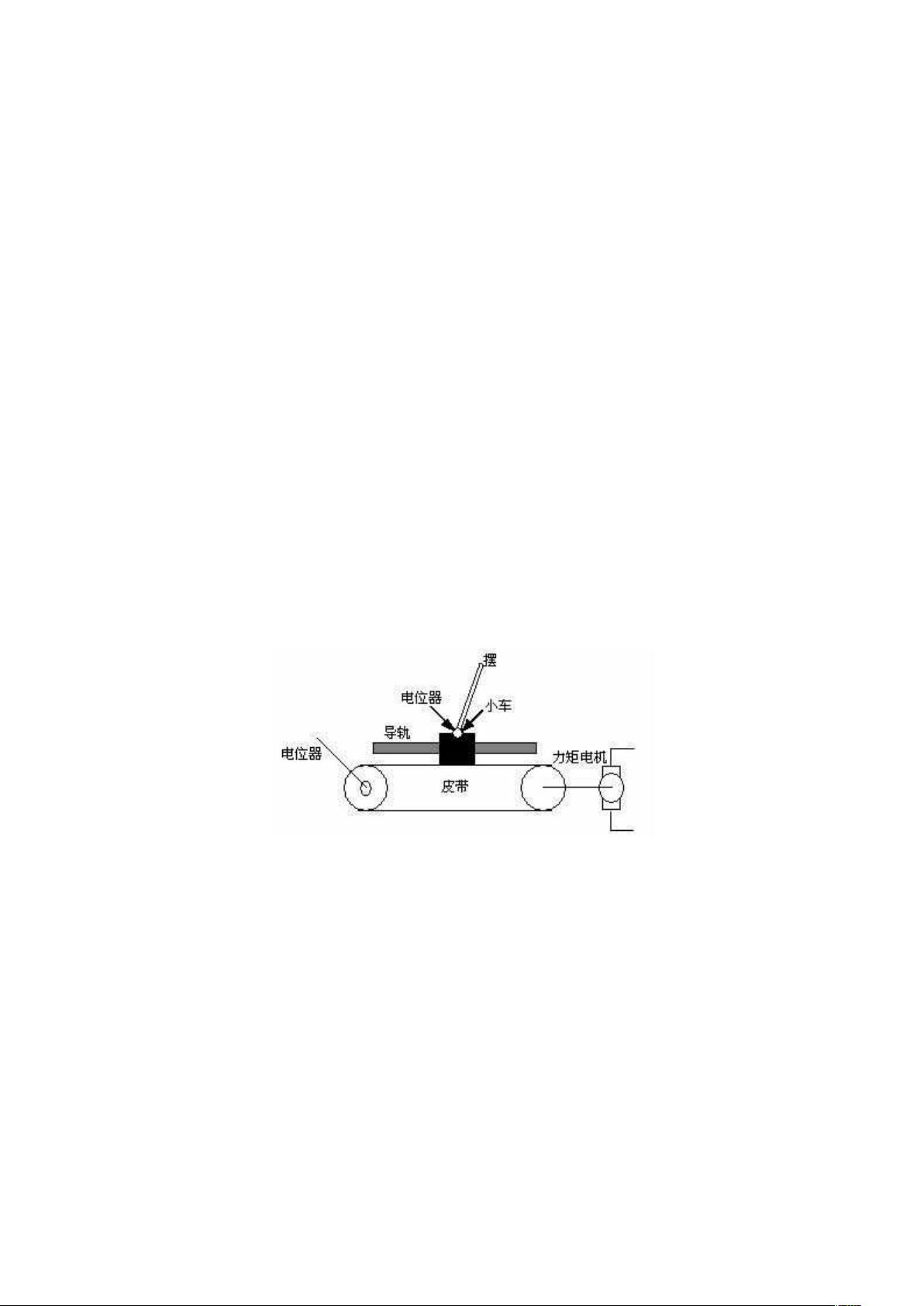
3.2 单级倒立摆系统描述 ……………………………7
3.3 单级倒立摆系统数学建模 ……………………… 8
3.3.1 结构参数 ………………………………………8
3.3.2 单级小车倒立摆的建模 ………………………8
4 单级倒立摆控制系统原理…………………………11
4.1 线性系经统的校正方法…………………………11


剩余20页未读,继续阅读

coollong8
- 粉丝: 0
- 资源: 1









最新资源
- 基于java+springboot+vue+mysql的粮仓管理系统设计与实现.docx
- 基于java+springboot+vue+mysql的美发管理系统设计与实现.docx
- 基于java+springboot+vue+mysql的美术馆管理系统设计与实现.docx
- 2023保健品行业洞察报告
- 基于java+springboot+vue+mysql的民宿管理系统设计与实现.docx
- 基于java+springboot+vue+mysql的培训机构管理系统设计与实现.docx
- 基于java+springboot+vue+mysql的民航网上订票系统设计与实现.docx
- 基于java+springboot+vue+mysql的入校申报审批系统设计与实现.docx
- 基于java+springboot+vue+mysql的汽车租赁系统设计与实现.docx
- 基于java+springboot+vue+mysql的商业辅助决策系统设计与实现.docx
- 基于java+springboot+vue+mysql的水产养殖系统设计与实现.docx
- 基于java+springboot+vue+mysql的社区网格化管理平台设计与实现.docx
- 基于java+springboot+vue+mysql的社区医疗服务系统设计与实现.docx
- 基于java+springboot+vue+mysql的玩具租赁系统设计与实现.docx
- 基于java+springboot+vue+mysql的闲置图书分享平台设计与实现.docx
- 基于java+springboot+vue+mysql的西安旅游系统设计与实现.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



- 1
- 2
前往页