"自动控制原理控制系统的校正PPT学习教案.pptx"
本文总结了自动控制原理控制系统的校正PPT学习教案的主要内容,涵盖了线性控制系统的校正、串联校正、反馈校正、前馈校正、频域法校正等方面的知识点。
一、线性控制系统的校正
在自动控制原理中,线性控制系统的校正是指通过设计和调整控制系统的参数,以满足系统的性能指标要求。根据系统的安置位置和连接方式不同,系统校正可以分为串联校正、反馈校正和前馈校正等三种基本形式。
二、串联校正
串联校正是指在系统不可变部分和校正装置之间串联一个或多个校正网络,以提高系统的稳定性和准确性。串联校正的优点是可以提高系统的增益和相位裕度,但也可能会出现振荡和不稳定性。
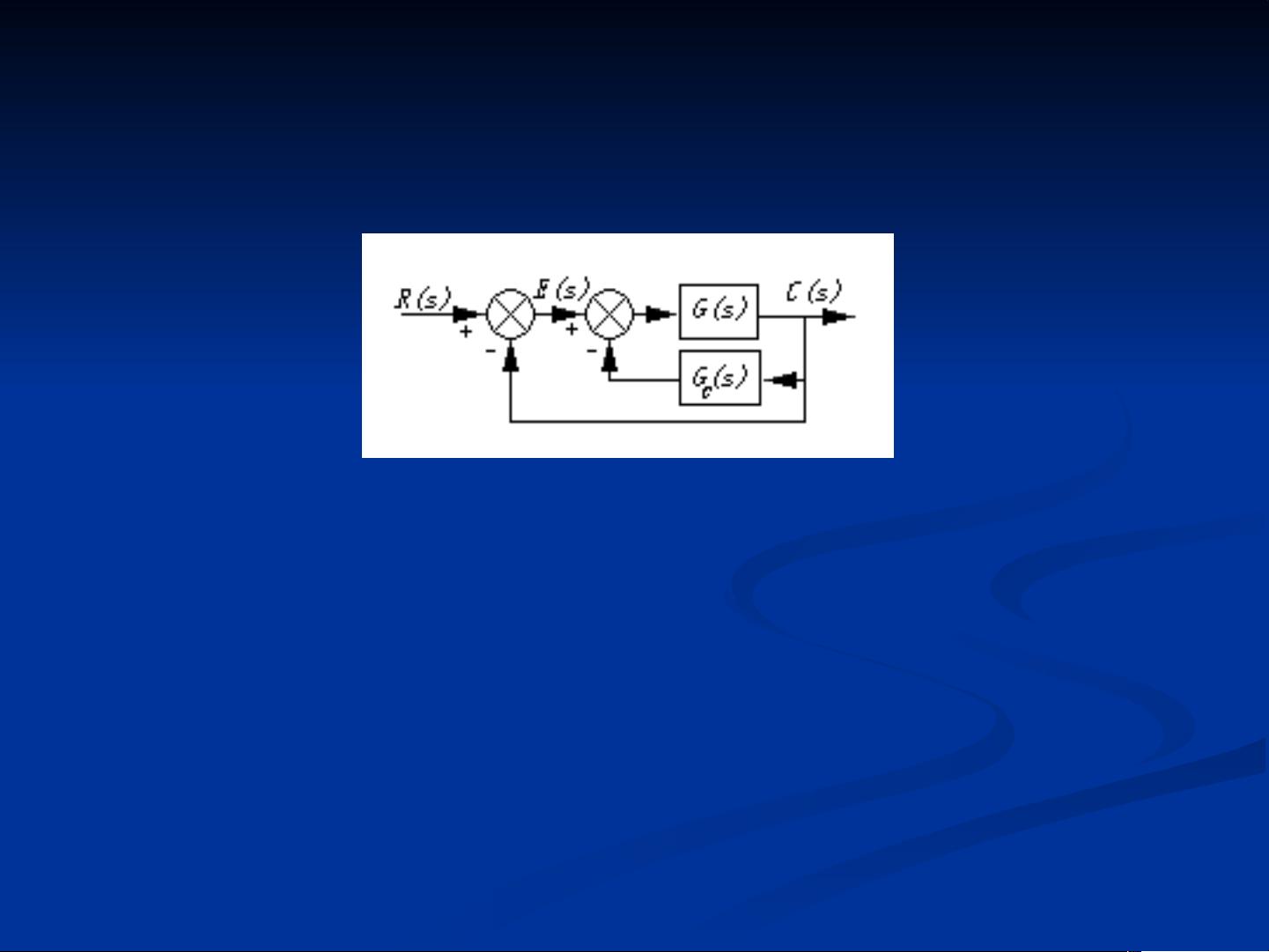
三、反馈校正
反馈校正是指在系统不可变部分和校正装置之间建立一个反馈通道,以确保系统的稳定性和准确性。反馈校正的优点是可以提高系统的稳定性和抗干扰能力,但也可能会出现振荡和不稳定性。
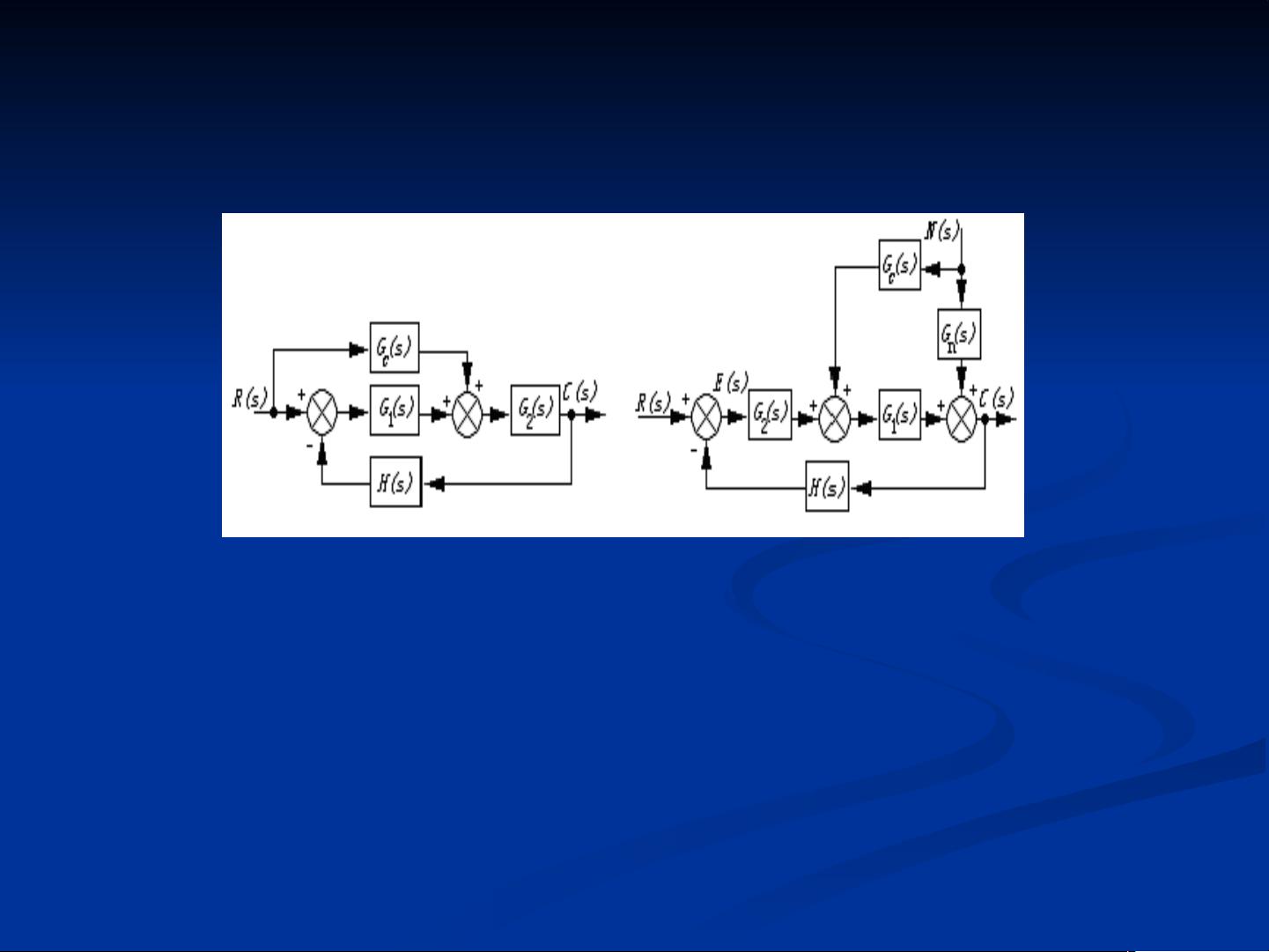
四、前馈校正
前馈校正是指在系统不可变部分和校正装置之间建立一个前馈通道,以确保系统的稳定性和准确性。前馈校正的优点是可以提高系统的快速性和抗干扰能力,但也可能会出现振荡和不稳定性。
五、频域法校正
频域法校正是指通过对系统的频率响应进行调整,以满足系统的性能指标要求。频域法校正的优点是可以提高系统的稳定性和抗干扰能力,但也可能会出现振荡和不稳定性。
六、无源校正装置
无源校正装置是指不需要外部能源的校正装置,例如无源超前网络和无源滞后网络。无源超前网络可以对系统的频率响应进行调整,以提高系统的稳定性和抗干扰能力。无源滞后网络可以对系统的频率响应进行调整,以提高系统的稳定性和抗干扰能力。
七、PID 调节器
PID 调节器是指一种常用的自动控制算法,通过对系统的输入和输出进行调整,以满足系统的性能指标要求。PID 调节器的优点是可以提高系统的稳定性和抗干扰能力,但也可能会出现振荡和不稳定性。
本文总结了自动控制原理控制系统的校正PPT学习教案的主要内容,涵盖了线性控制系统的校正、串联校正、反馈校正、前馈校正、频域法校正等方面的知识点,为学习自动控制原理提供了有价值的参考。