
基于 STM32 单片机的简单红外循迹的实现
初步接触 STM32,采用两路红外传感器实现小车循迹,稍显简略,如有不好的
地方,欢迎大家指点改正
此次红外循迹是我在做毕设过程无意中实现的,所有有些地方不够精确完美,还请各位友
友们多多指点校正。这篇文章也是小弟第一篇文章,
小弟不才,文笔不怎么行,可能有些语句不太通顺的地方,只能让各位将就一下了。那么
接下来就进入正题吧。
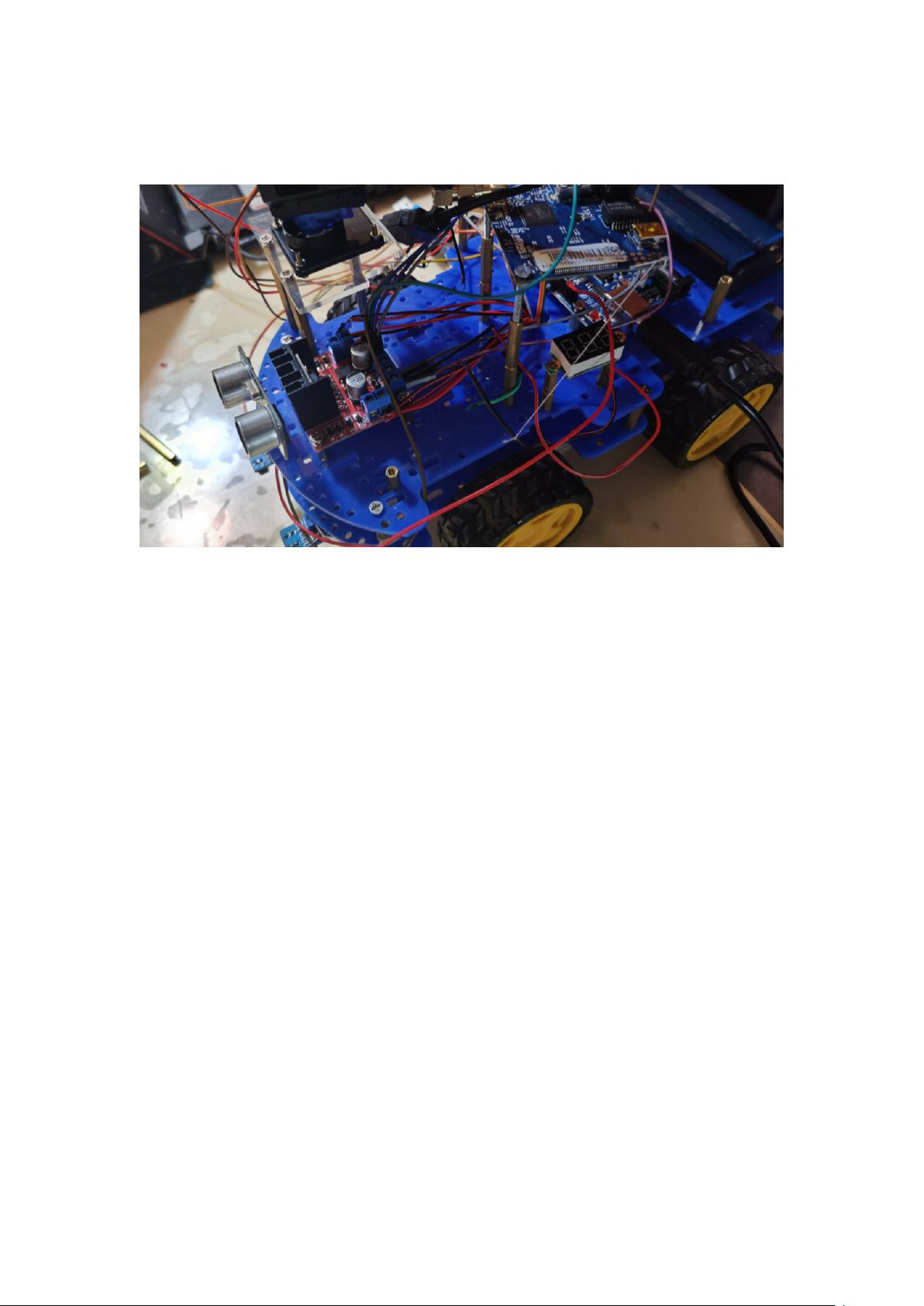
一、硬件选择
①首先我们需要一个单片机开发板,在这里我使用的是 STM32F103RCT6 型号的单片机,
这个大家也可以自己买其他的类型;②然后就是电机和电机
驱动模块,市面上的电机有很多种,有带编码器的,也有不带编码器的,由于此次循迹只
是简单的巡线操作,所以我用的是不带编码器的直流减速
电机,大部分的小车其实都够用了,而驱动模块选的是 L298N 模块,这个应该大家还是
比较熟悉吧,后续我也会详细介绍的;③然后电源部分的话,
你可以选择分开给驱动模块和单片机单独供电,也可以用一个电源就行了,我在这里用的
两节 18650 的锂电池给驱动模块供电,然后用了一个移动
电源给单片机供电;④循迹模块我用的是红外传感器,这个其实也有很多类型的,有数字
信号的,也有模拟信号的,我用的是简单的输出数字信号
资源评论













