

摘要
随着物联网的兴起,Android 手机以其独有的开放性优势正在为我们提供更多优质便捷
的技术成果。Android 手机以其独有的开放性优势正在为我们提供更多优质便捷的技术成果。
本课题研究的是基于安卓手机蓝牙控制的智能机器人设计,基于手机平台,借助于蓝牙技术,
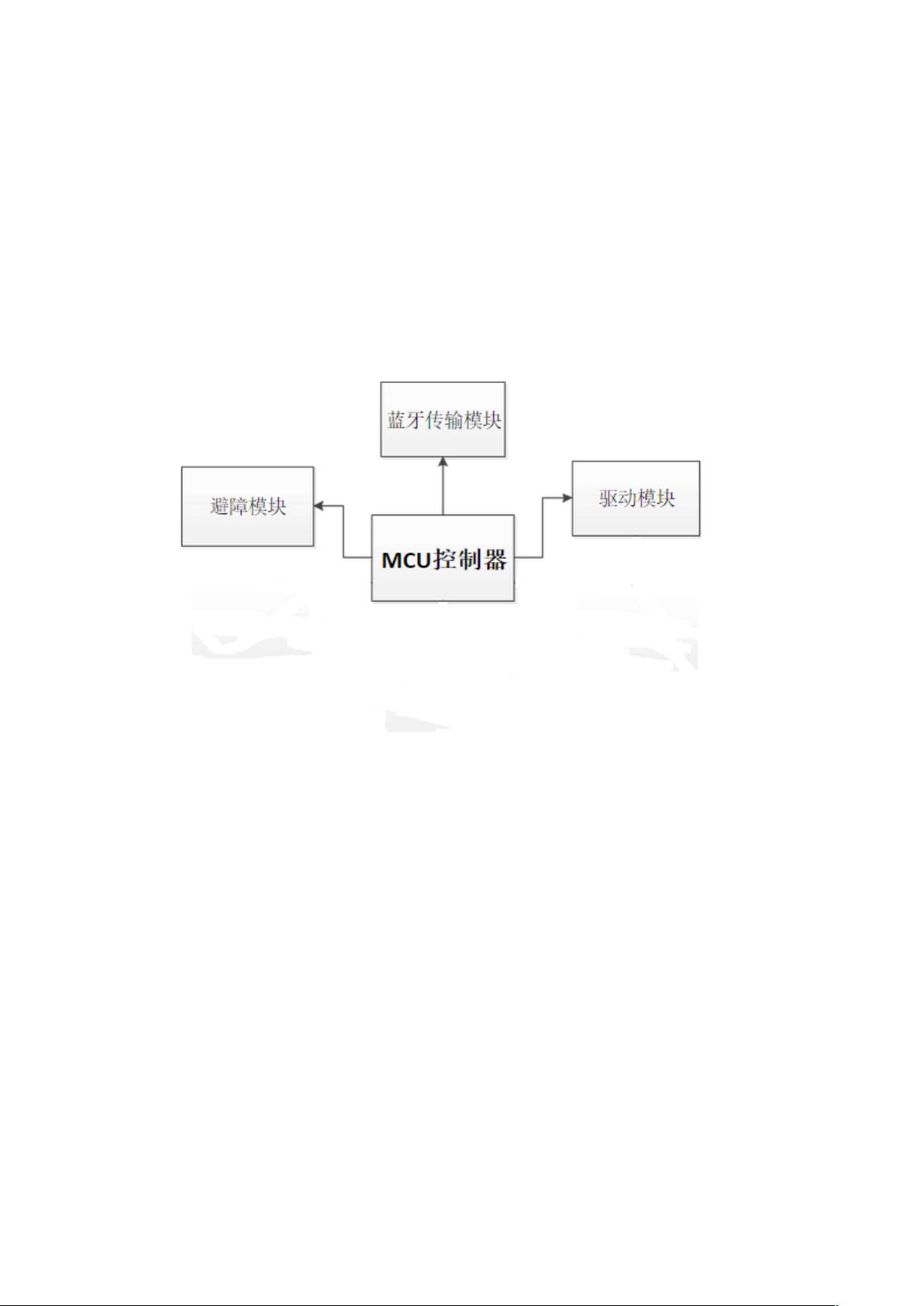
设计和实现了一种无线遥控小车新的解决方案。设计以手机控制平台、蓝牙通讯模块、电机
驱动模块等硬件模块组成的遥控小车。实现小车的前进、后退、前左转弯、前右转弯、后左
转弯、后右转弯以及机器人手部动作等实时控制功能。
设计了该系统的硬件电路原理图和 PCB 图,控制系统以 STC12C5A60S2 单片机为主控
芯片,采用 L298M 为电机驱动芯片、蓝牙无线遥控模块、红外光电传感器模块、超声波发
射与接收模块等构成外围扩展电路。将自制的控制电路、控制程序和四轮小车机械结构相结
合,制作多功能机器人小车。实验调试实现了智能小车的蓝牙无线遥控、自动避障、自动循
迹等功能。
关键词:单片机 ;蓝牙遥控 ;PWM 调速;超声波测距传感器

剩余13页未读,继续阅读
资源评论


omyligaga
- 粉丝: 97
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- MATLAB界面版本-汉字识别.zip
- 双有源桥DC-DC变器仿真 隔离型双向变器 采用光伏(PV)+蓄电池+负载 光伏采用mppt 控制 蓄电池恒流充放电控制 闭环控制,matlab2021b仿真模型
- MATLAB界面版本-火焰识别系统设计.zip
- MATLAB界面版本-基于DWT+SVD结合傅里叶变换的数字图像水印水印系统.zip
- MATLAB界面版本-家居防火识别系统.zip
- MATLAB界面版本-火焰烟雾检测.zip
- MATLAB界面版本-教室人数统计.zip
- MATLAB界面版本-金属表面缺陷分析.zip
- MATLAB界面版本-交通道路标识识别.zip
- MATLAB界面版本-考勤系统设计.zip
- MATLAB界面版本-口罩识别.zip
- MATLAB界面版本-口罩检测.zip
- MATLAB界面版本-口罩识别设计.zip
- MATLAB界面版本-口罩识别检测.zip
- MATLAB界面版本-垃圾分类系统.zip
- MATLAB界面版本-垃圾识别定位.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


