
ABB 机器人的手动操作(1)
- .word.zl.
ABB[a]/-J-3ABB 机器人的手动操作
3.1 任务目标
➢ 掌握手动操作机器人运动的三种模式。
➢ 使用“增量〞模式来控制机器人的运动。
➢ 熟练使用手动操纵的快捷方式。
➢ 掌握 ABB 机器人转数计数器更新操作。
3.2 任务描述
手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。如何使用这三种模式手动
操作机器人运动是工程的主要内容。
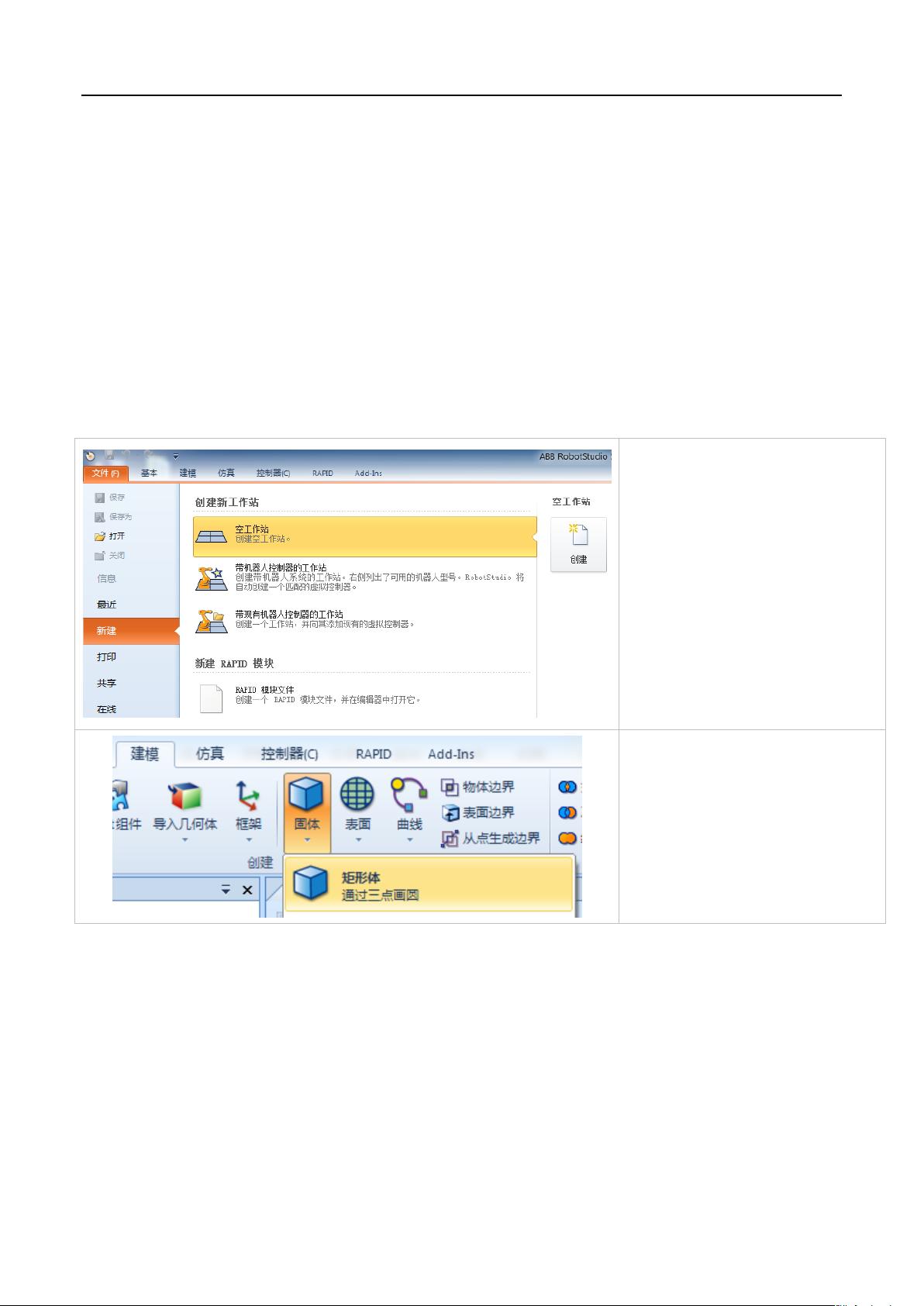
建立一个工作站,ABB 型号为 IRB120,Y 轴上建模长方体,长 200mm,宽 200mm,高 400mm,在长方
体的内角上进展重定位运动,之后恢复到机械远点。〔手动操作练习需要教师指导,同时需要上机练习〕
3.3 知识储藏
3.3.1 手动操作三种模式
1.单轴运动
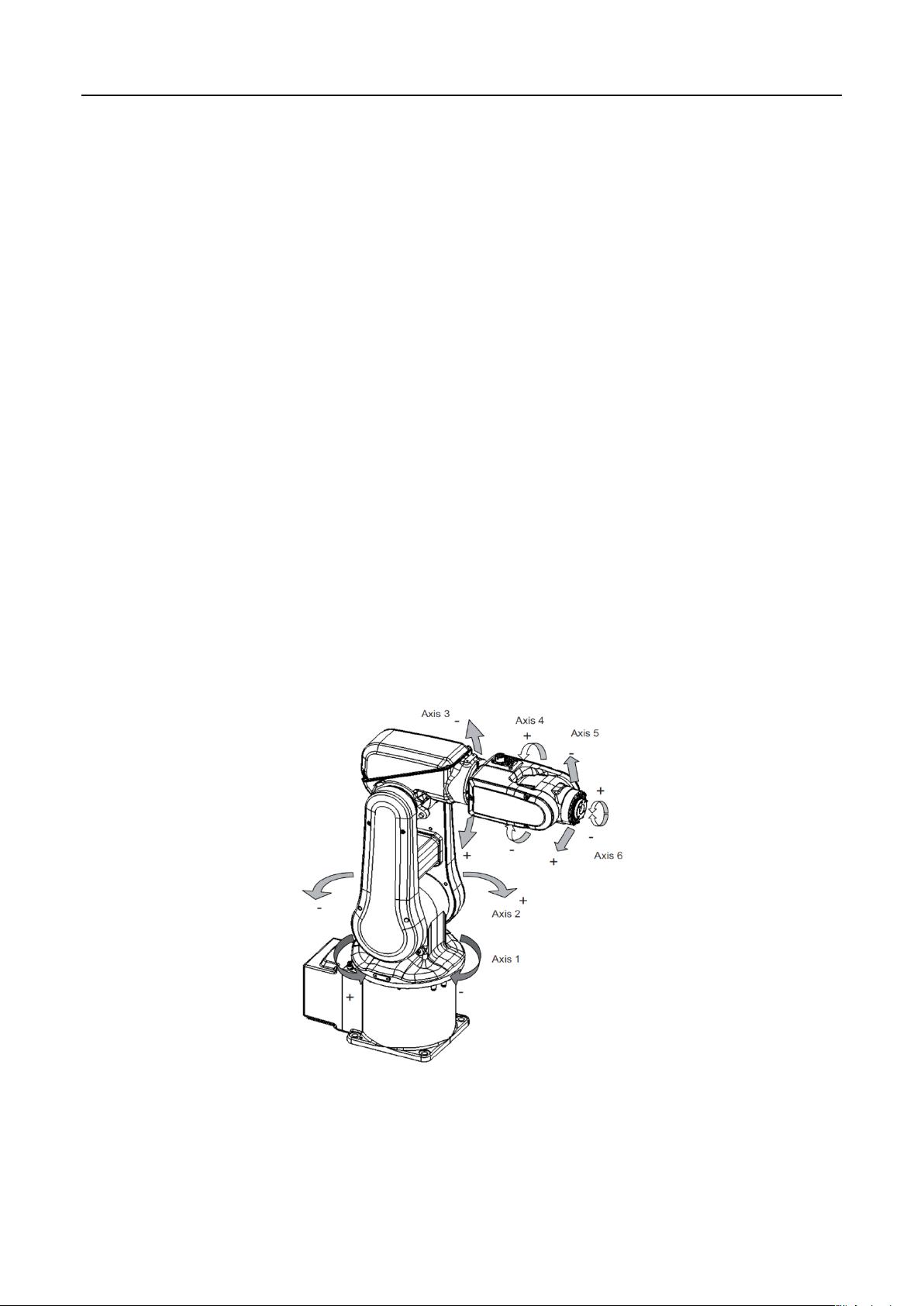
一般地,ABB 机器人是由六个伺服电动机分别驱动机器人的六个关节轴,那么每次手动操纵一个关节
轴的运动,就称之为单轴运动。
图 2 IRB 120 机器人的关节轴
2.线性运动
机器人的线性运动是指安装在机器人第六轴法兰盘上工具的 TCP 在空间中作线性运动。

剩余23页未读,继续阅读
资源评论













