
ABB 机器人利用 HotEdit 调整机器人点位详解
ABB 机器人利用 HotEdit 调整机器人点位详解
ABB 机器人的 HotEdit 功能相信对于很多小伙伴们来说是既熟悉
又陌生,熟悉的是我们每次打开 ABB 机器人的主菜单都会看到
“HotEdit”这个由 7 个英文字母所组成的菜单,陌生的是可能我们很
少打开并使用它。不过既然 ABB 机器人在设计菜单布局的时候就把
HotEdit 的位置放在基本菜单的首要位置,那么就说明 HotEdit 应该机
器人中使用频率很高的功能(当然也有可能是按首字母排的顺序),
甚至超过程序编辑器的使用频率,但是从现场的使用情况来看很少有
小伙伴使用它,甚至很少有小伙伴知道它,那么这一次,我们就一起
来揭开 HotEdit 的“神秘面纱”。
HotEdit 从字面意思上来看这是“热编辑”的意思,它是对于编程
位置(robtarget 类型位置)进行调节的一个功能。该功能有一个区
别于其它位置调节方式的特色——可以在机器人的任何操作模式下使
用,即使是自动模式。而且它还支持“恢复”操作,即对于我们做出
的位置修改,如果我们对于修改位置不满意,我们可以进行“撤销”
操作,感觉调节的可以了再进行提交保存,将调节后的位置写入控制
器。下面我们就一起来看一下 HotEdit 的使用步骤。
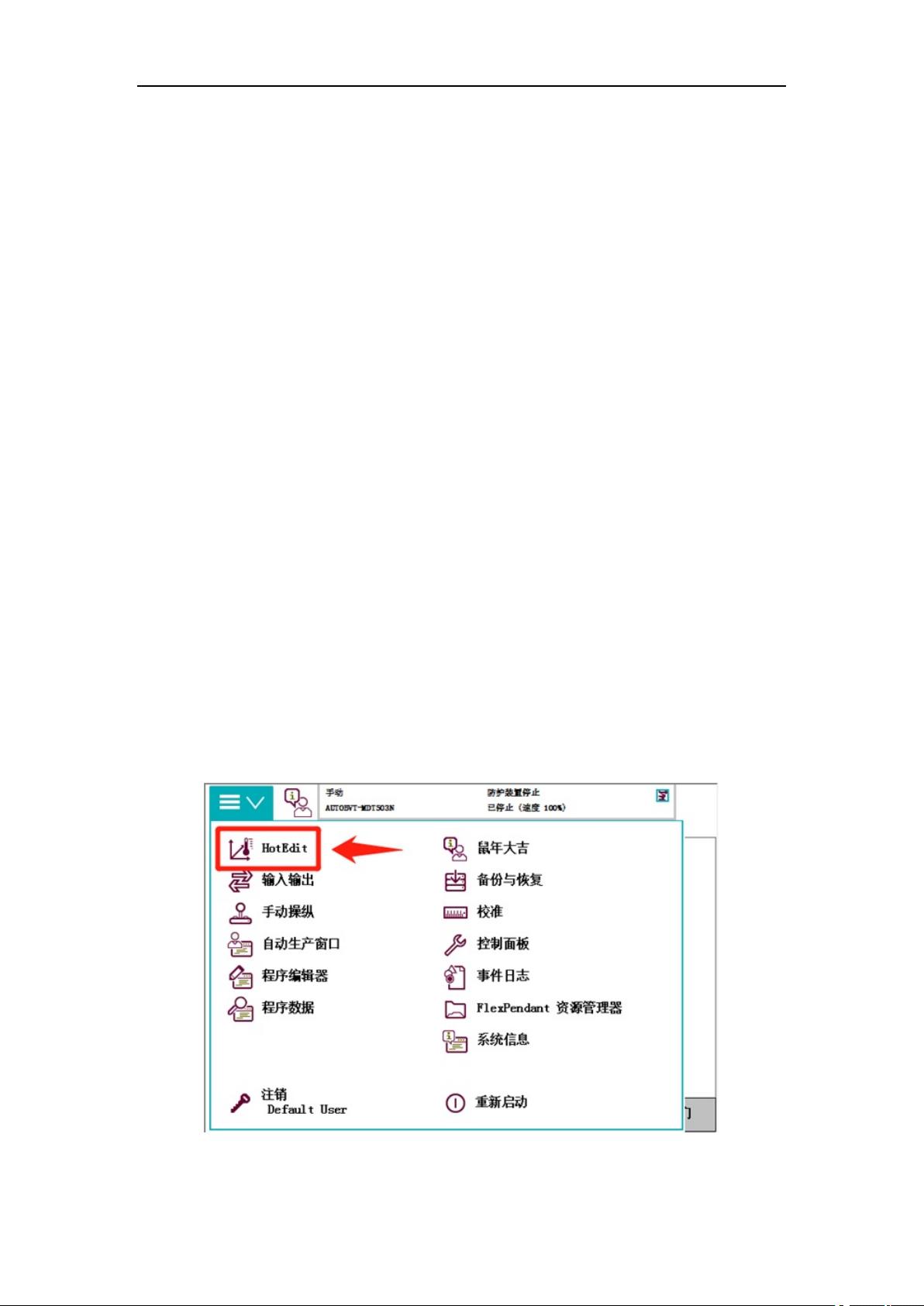
在机器人主菜单中打开 HotEdit。
进入后首先是选择调用点位所在的程序模块
资源评论

 Lei°_2024-01-01果断支持这个资源,资源解决了当前遇到的问题,给了新的灵感,感谢分享~
Lei°_2024-01-01果断支持这个资源,资源解决了当前遇到的问题,给了新的灵感,感谢分享~

是空空呀
- 粉丝: 193
- 资源: 3万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


