《机器人的组成结构》
机器人技术是现代科技领域的重要组成部分,尤其在自动化生产和智能制造中扮演着关键角色。机器人由多个子系统构成,包括机械部分、传感部分和控制部分,共同协作实现复杂的功能。
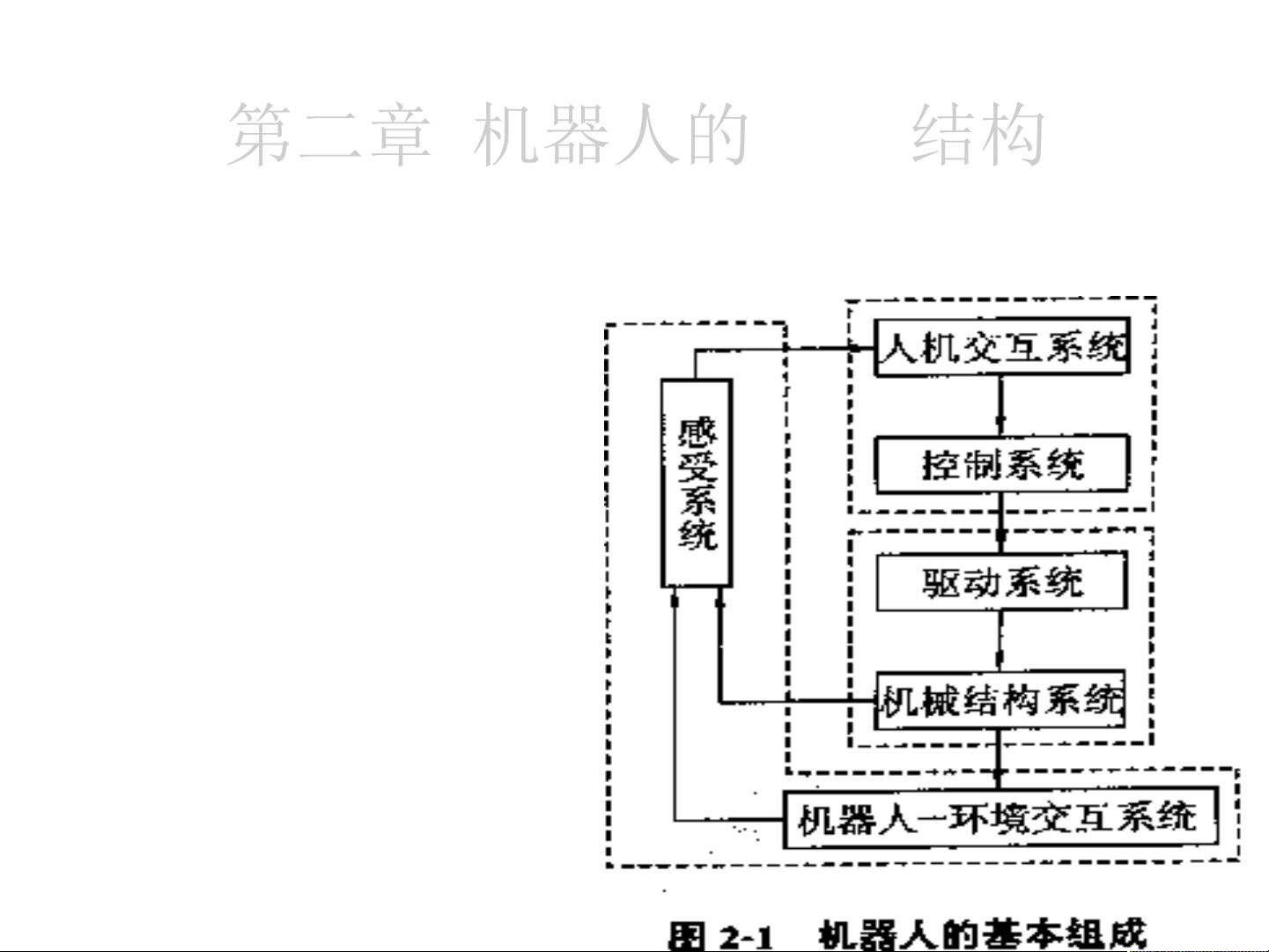
2.1 机器人系统的组成
1. **驱动系统**:驱动系统是机器人的动力源泉,为各个关节提供运动能力。通过传动装置,驱动系统能够控制机器人的各个自由度,使其完成预定的动作。
2. **感受系统**:感受系统由内部和外部传感器模块组成,负责收集机器人内部状态和周围环境的信息。智能传感器的使用极大地提升了机器人的感知能力,使机器人具有更高的机动性、适应性和智能化水平。
3. **机器人-环境交互系统**:此系统使得机器人能够与外部设备互动,如形成加工、焊接或装配等集成工作单元,实现与环境的协同作业。
4. **人-机交互系统**:人-机交互系统包括指令给定和信息显示装置,使操作者能够控制机器人并获取其运行状态的反馈。
5. **控制系统**:控制系统是机器人的大脑,依据作业指令和传感器反馈,控制执行机构执行任务。控制系统分为开环和闭环,以及程序控制、适应性控制和人工智能控制等多种类型,根据控制运动形式可分为点位控制和连续轨迹控制。
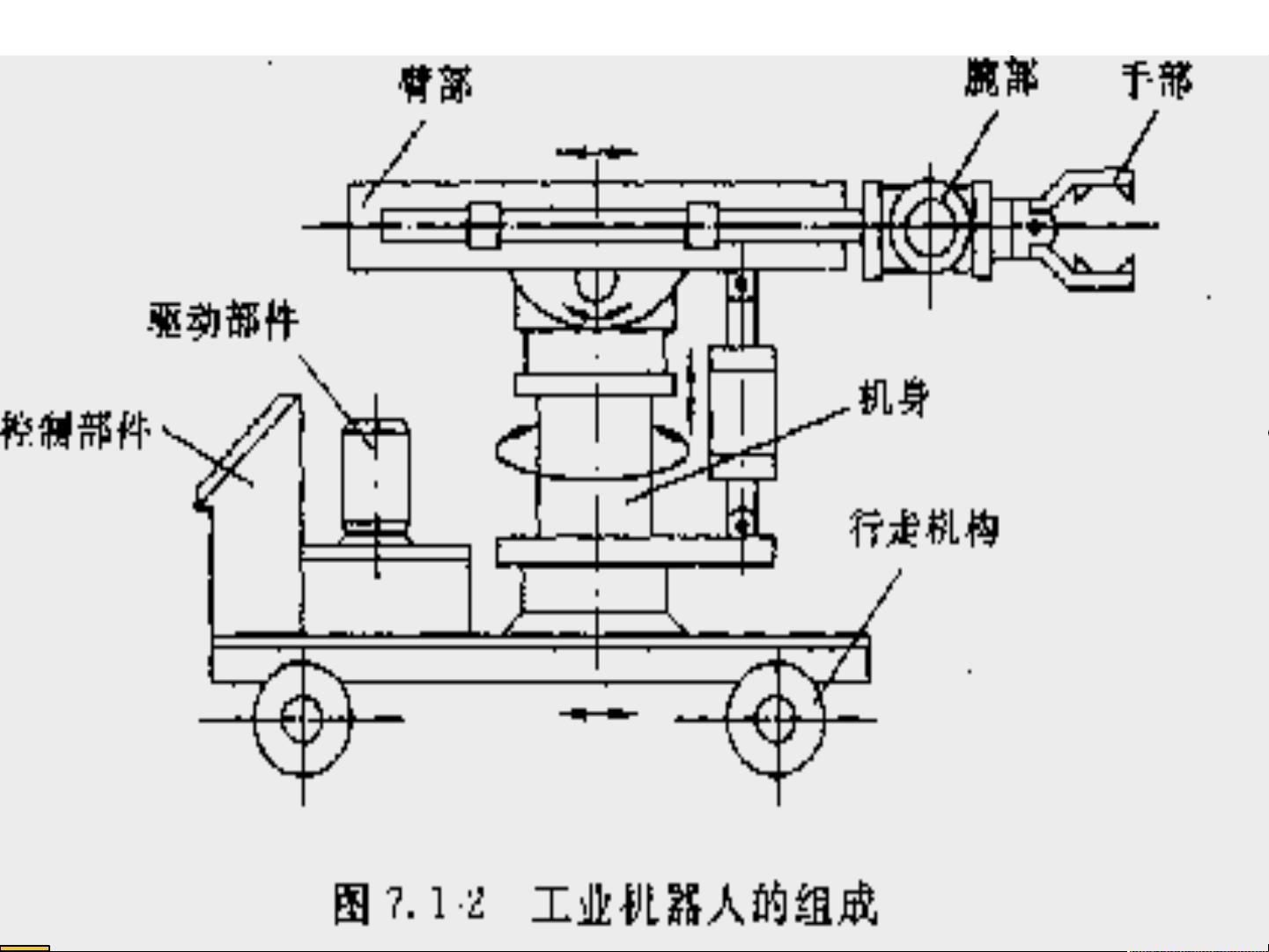
2.2 工业机器人的机械结构
工业机器人的机械结构通常包括手部、腕部、臂部和机身(有时包含行走机构)。机械手的动作由旋转、回转和伸缩三种基本动作组合而成。
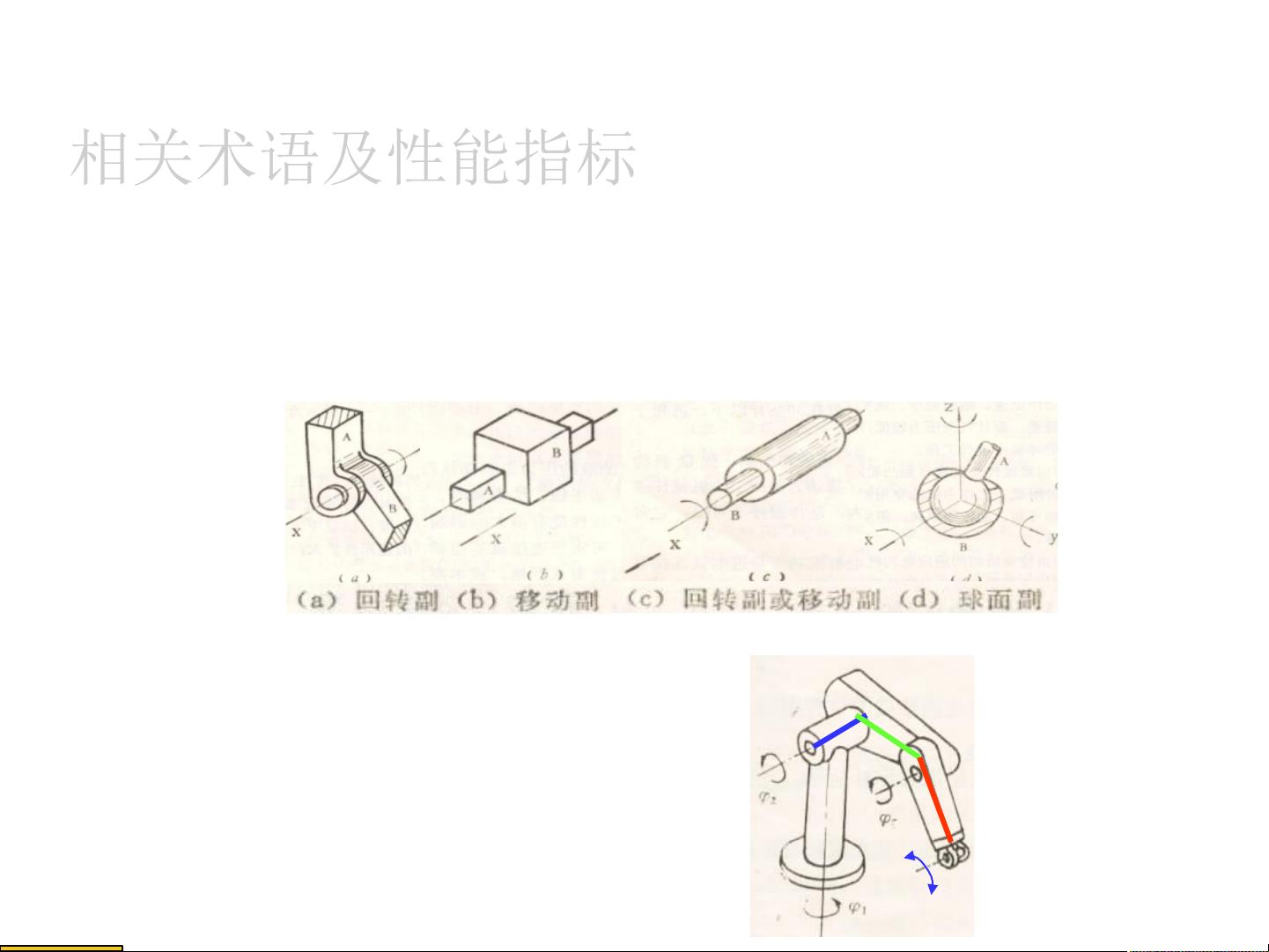
2.2.1 机械手的动作形态
1. **旋转**:轴线与转动轴同轴的转动。
2. **回转**:轴线与转动轴不同轴的转动。
3. **伸缩**:直线运动。
2.2.2 机械手的坐标形式和自由度
机械手的坐标形式主要有直角坐标型、圆柱坐标型、极坐标型和多关节型:
1. **直角坐标型**:在三个互相垂直的轴线上做直线运动,计算和控制简单,但占用空间大,适用于特定应用。
2. **圆柱坐标型**:一个旋转和两个直线运动,适用于油压或气压驱动,适合环绕操作对象的情况。
3. **极坐标型**:旋转、回转和直线伸缩,类似圆柱坐标型,但更灵活。
4. **多关节型**:模拟人臂结构,由多个旋转关节组成,灵活性高,适用于复杂操作,广泛应用于智能机器人。
2.2.3 机器人机构运动简图
以PUMA-262机器人为例,其机构包括立柱(腰关节)、大臂和小臂(肩关节和肘关节),手腕有三个垂直的旋转轴。这些关节的运动参数决定了手腕的工作空间,也就是机器人可以到达的全部空间区域。
总结来说,机器人的组成结构涉及了多个子系统,通过精密的设计和协调,实现了机器人在不同领域的广泛应用。从驱动到感知,再到控制,每一部分都至关重要,共同构建了一个高效、灵活的机器人系统。了解这些基础知识对于理解机器人的工作原理和设计思路至关重要,有助于推动机器人技术的进一步发展和创新。









评论0
最新资源