
README_cn.md 2023-12-14
1 / 20
planning
介
绍
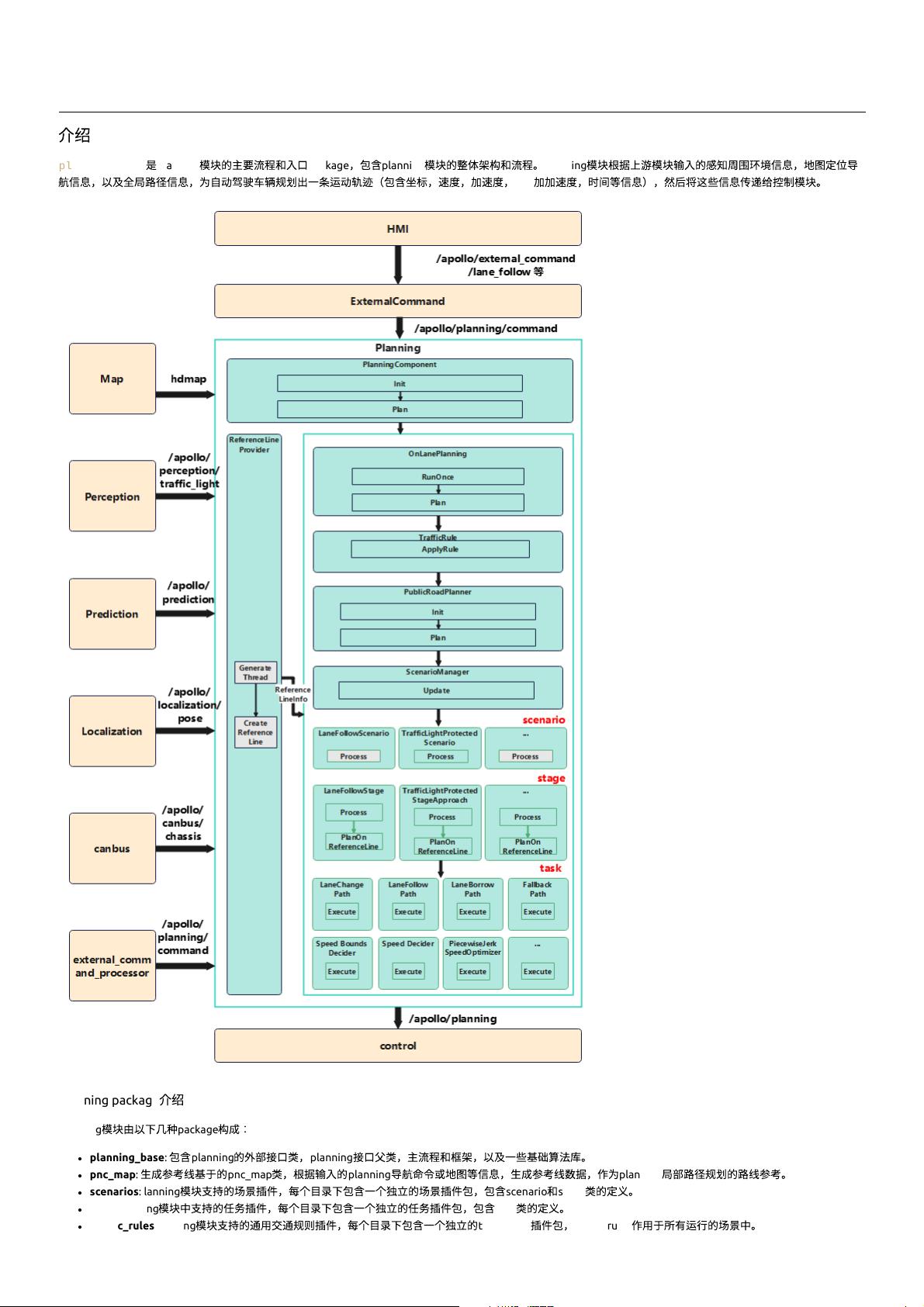
planning base
是
planning
模
块
的
主
要
流
程
和
⼊
⼝
package
,
包
含
planning
模
块
的
整
体
架
构
和
流
程
。
planning
模
块
根
据
上
游
模
块
输
⼊
的
感
知
周
围
环
境
信
息
,
地
图
定
位
导
航
信
息
,
以
及
全
局
路
径
信
息
,
为
⾃
动
驾驶
⻋辆
规
划出
⼀
条
运
动
轨
迹
(
包
含
坐
标
,
速
度
,
加
速
度
,
jerk
加加
速
度
,
时
间
等
信
息
),
然
后
将
这
些
信
息
传
递
给
控
制
模
块
。
planning package
介
绍
planning
模
块
由
以
下
⼏
种
package
构
成
:
planning_base:
包
含
planning
的
外
部
接
⼝
类
,
planning
接
⼝
⽗
类
,
主
流
程
和
框
架
,
以
及
⼀些
基
础
算
法
库
。
pnc_map:
⽣
成
参
考
线
基
于
的
pnc_map
类
,
根
据
输
⼊
的
planning
导
航
命
令
或
地
图
等
信
息
,
⽣
成
参
考
线
数
据
,
作
为
planning
局
部
路
径
规
划
的
路
线
参
考
。
scenarios: lanning
模
块
⽀
持
的
场
景
插
件
,
每
个
⽬
录
下
包
含
⼀个
独
⽴
的
场
景
插
件
包
,
包
含
scenario
和
stage
类
的
定
义
。
tasks: lanning
模
块
中
⽀
持
的
任
务
插
件
,
每
个
⽬
录
下
包
含
⼀个
独
⽴
的
任
务
插
件
包
,
包
含
task
类
的
定
义
。
traffic_rules: lanning
模
块
⽀
持
的
通
⽤
交
通
规
则
插
件
,
每
个
⽬
录
下
包
含
⼀个
独
⽴
的
traffic rule
插
件
包
,
traffic rules
作
⽤
于
所
有
运
⾏
的
场
景
中
。
剩余19页未读,继续阅读
资源评论


埋头苦干的墨小白
- 粉丝: 45
- 资源: 6









最新资源
- YOLO算法-废物分类数据集-410张图像带标签-瓶子.zip
- YOLO算法-车辆数据集-230张图像带标签-奔驰.zip
- YOLO算法-刀数据集-400张图像带标签-刀.zip
- YOLO算法-列车检测数据集-191张图像带标签-火车.zip
- YOLO算法-易拉罐识别数据集-512张图像带标签-可口可乐.zip
- YOLO算法-水泥路面裂纹检测数据集-213张图像带标签-裂纹.zip
- YOLO算法-道路裂纹数据集-139张图像带标签-裂纹.zip
- YOLO算法-下水道缺陷数据集-2364张图像带标签-关节偏移-障碍物-裂纹-带扣-洞-公用设施入侵-碎片.zip
- YOLO算法-刀具数据数据集-168张图像带标签-刀.zip
- YOLO算法-刀数据集-198张图像带标签-刀-枪.zip
- YOLO算法-检测驾驶员侧车窗是否关闭数据集-85张图像带标签-汽车车窗-汽车.zip
- YOLO算法-树数据集-75张图像带标签-树.zip
- YOLO算法-刀具检测数据集-61张图像带标签-.zip
- YOLO算法-汽车数据集-120张图像带标签-汽车.zip
- YOLO算法-工作场所安全隐患数据集-60张图像带标签-倒下的工人-配备个人防护装备的工人-无个人防护装备的工人-火.zip
- YOLO算法-水泥路面裂纹数据集-42张图像带标签-裂纹.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


