"Apollo感知模块详解与实践"
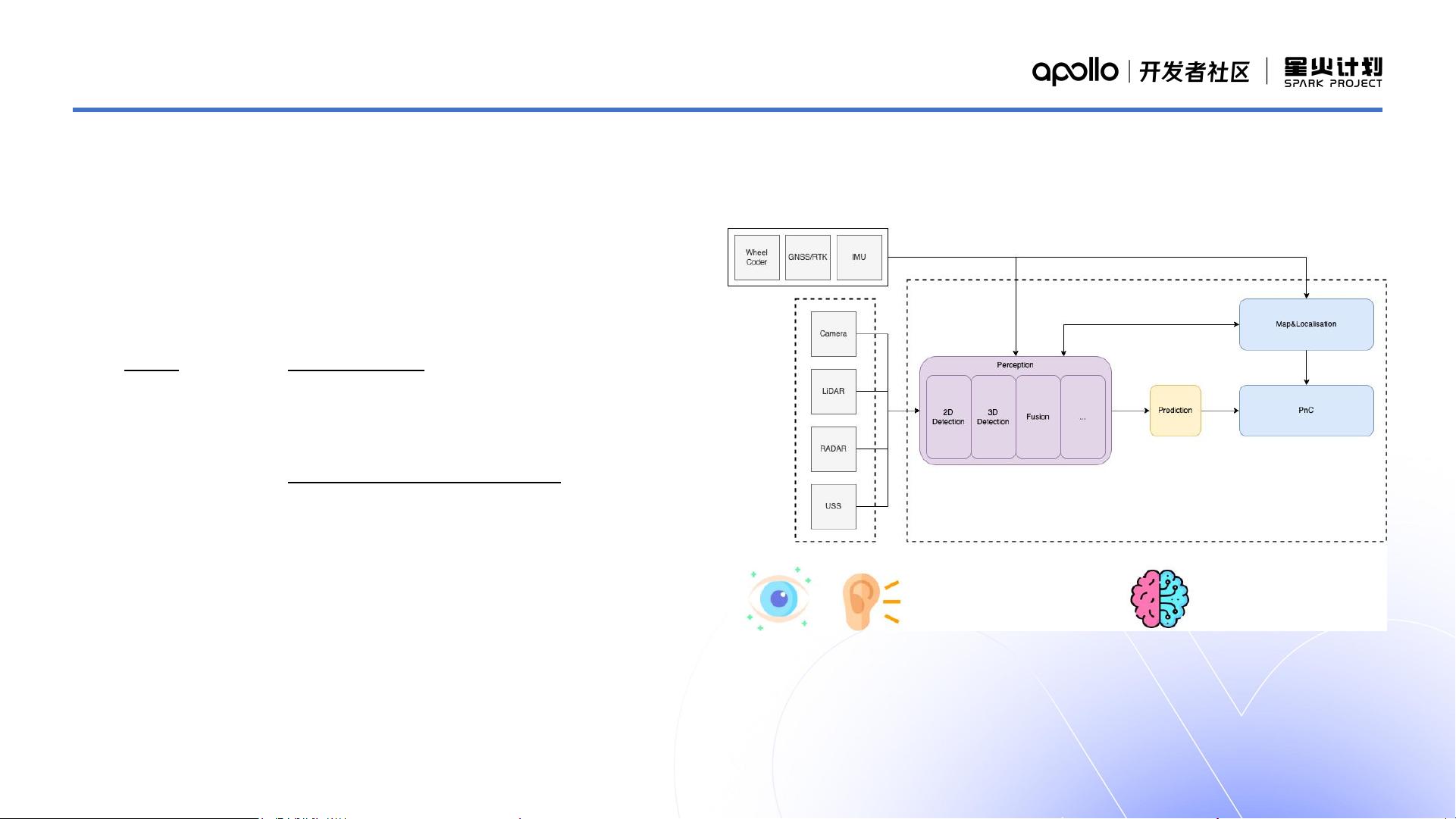
Apollo感知模块是自动驾驶系统中的一部分,负责对周围环境的感知和理解,以提供必要的信息给后续的规划控制模块。该模块主要包括Camera、LiDAR、Fusion等几个部分,每个部分都有其特定的作用和特点。
Camera模块是Apollo感知系统中最基本的模块之一,其作用是捕捉周围环境的图像信息,并将其传输给后续的处理单元。Camera模块可以分为多种类型,如前视摄像头、环视摄像头、鱼眼摄像头、双目摄像头、事件相机等,每种类型都有其特定的应用场景和优点。
LiDAR模块是Apollo感知系统中 another important part,它可以通过激光束来扫描周围环境,并测量物体的距离和速度。LiDAR模块可以分为多种类型,如机械式OPA、EEL激光器堆叠工艺、MEMS、混合同固态等,每种类型都有其特定的优点和缺点。
Fusion模块是Apollo感知系统中的一部分,负责将来自不同传感器的信息融合起来,以获得更加准确和完整的环境信息。Fusion模块可以使用不同的算法和技术,如深度学习、传统算法、SLAM等,以实现对环境的感知和理解。
Apollo感知模块的作用可以总结为以下几点:
* 静态环境结果,如道路信息、路标、红绿灯等
* 动态障碍物结果,如机动车、自行车、行人等
* 场景信息,如高速、十字路口、无保护左转、停车场等
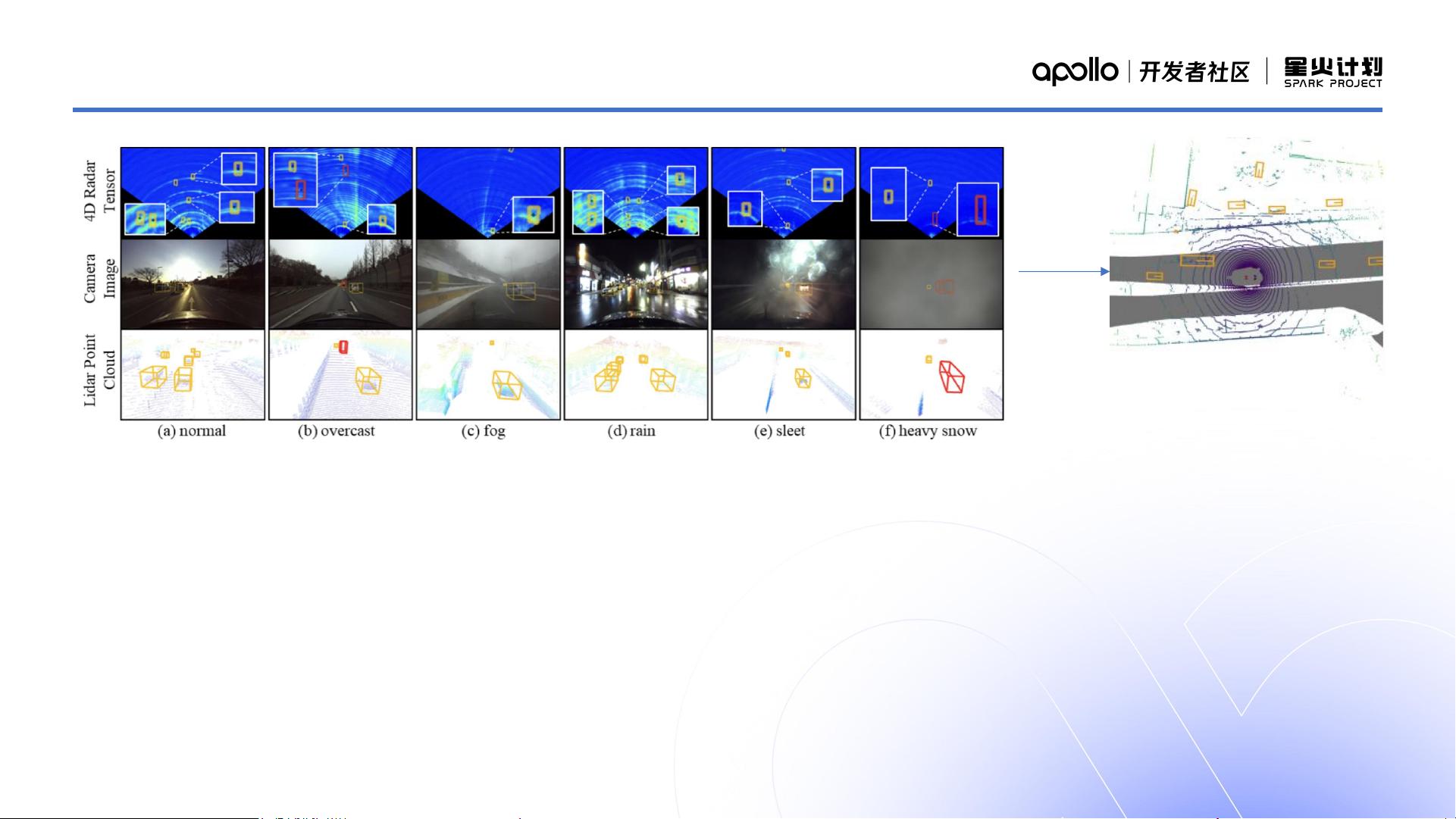
* 天气信息,如雨雪雾等
Apollo感知模块的工作流程可以总结为以下几步:
* 数据采集:从不同的传感器采集数据,如Camera、LiDAR等
* 数据处理:对采集到的数据进行处理和分析,以获得环境信息
* 信息融合:将来自不同传感器的信息融合起来,以获得更加准确和完整的环境信息
* 环境感知:对环境信息进行感知和理解,以提供必要的信息给后续的规划控制模块
Apollo感知模块的知识点可以总结为以下几点:
* 感知的定义和作用
* 传感器的类型和特点,如Camera、LiDAR等
* 传感器的工作原理和扫描方式,如机械式OPA、EEL激光器堆叠工艺、MEMS等
* 感知算法和技术,如深度学习、传统算法、SLAM等
* 环境感知和理解
Apollo感知模块的实践应用非常广泛,如自动驾驶、机器人、智能家居等领域。










评论0
最新资源