
四元数与三维旋转
Krasjet*
这篇文章的主要目的就是简单讨论一下四元数(Quaternion)与三维旋转
之间的关系.虽然网上四元数相关的资料有很多了,但是我好像一直没找到
令我满意的,所以就想自己来写一篇.
目前很多资料都使用了很代数的方法来解释这一主题,而且在某一些点上
讲得不是很清楚.因为 3D 空间还是在我们理解范围之内的,所以四元数与
三维旋转的一些关系可以直接使用一些基础的几何学和线性代数的知识来推
导和理解,并不会那么复杂.我们在大部分的时间中也会采用这一方式来理
解四元数,如果你对更抽象的内容感兴趣,我在最后也非常浅显地提到一些,
但是它们不是我们的重点.
因为我们主要的侧重点会偏向几何以及计算机图形学中的应用,如果你是
因为在学习物理学或者抽象代数来看这篇文章,我不确定这篇文章能否帮助
到你.当然,我在最后提到的一些拓展阅读可能还是有一点用的.
我在写这篇文章的时候顺手写了一些用于 Demo 的 MATLAB/Octave 代码,
并且将动画导出为了 GIF,你可以在 GitHub 上找到它们:https://github.com/
Krasjet/quaternion
写完之后一直没有怎么校对过,所以肯定会存在很多错误.如果你发现有
任何错误或者对内容有什么意见,请直接到 GitHub 的 Issues 里报告,或者用
Email 来联系我.
本文采用「CC BY-NC-SA 4.0」协议,在共享的时候请记得署名以及采用相
同的协议,并且不要用于商业用途.
1 复数
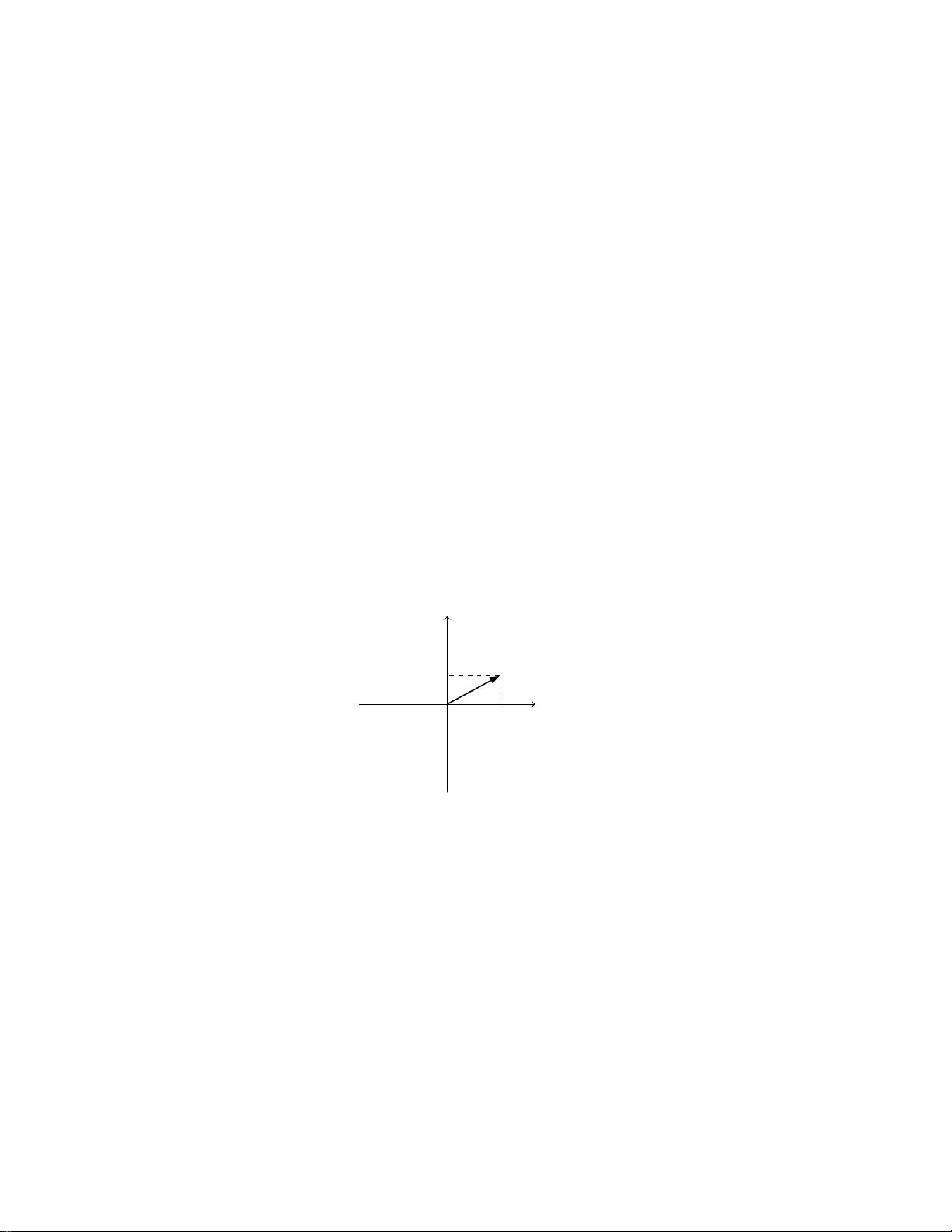
在介绍四元数与 3D 旋转之间的关系之前,我们先来讨论一下复数(Complex
Number)的一些性质以及它与 2D 旋转之间的关系.四元数的很多性质在很
多层面上都与复数非常类似,所以理解复数的一些性质会对理解四元数非常
有帮助.
1


剩余72页未读,继续阅读
资源评论













