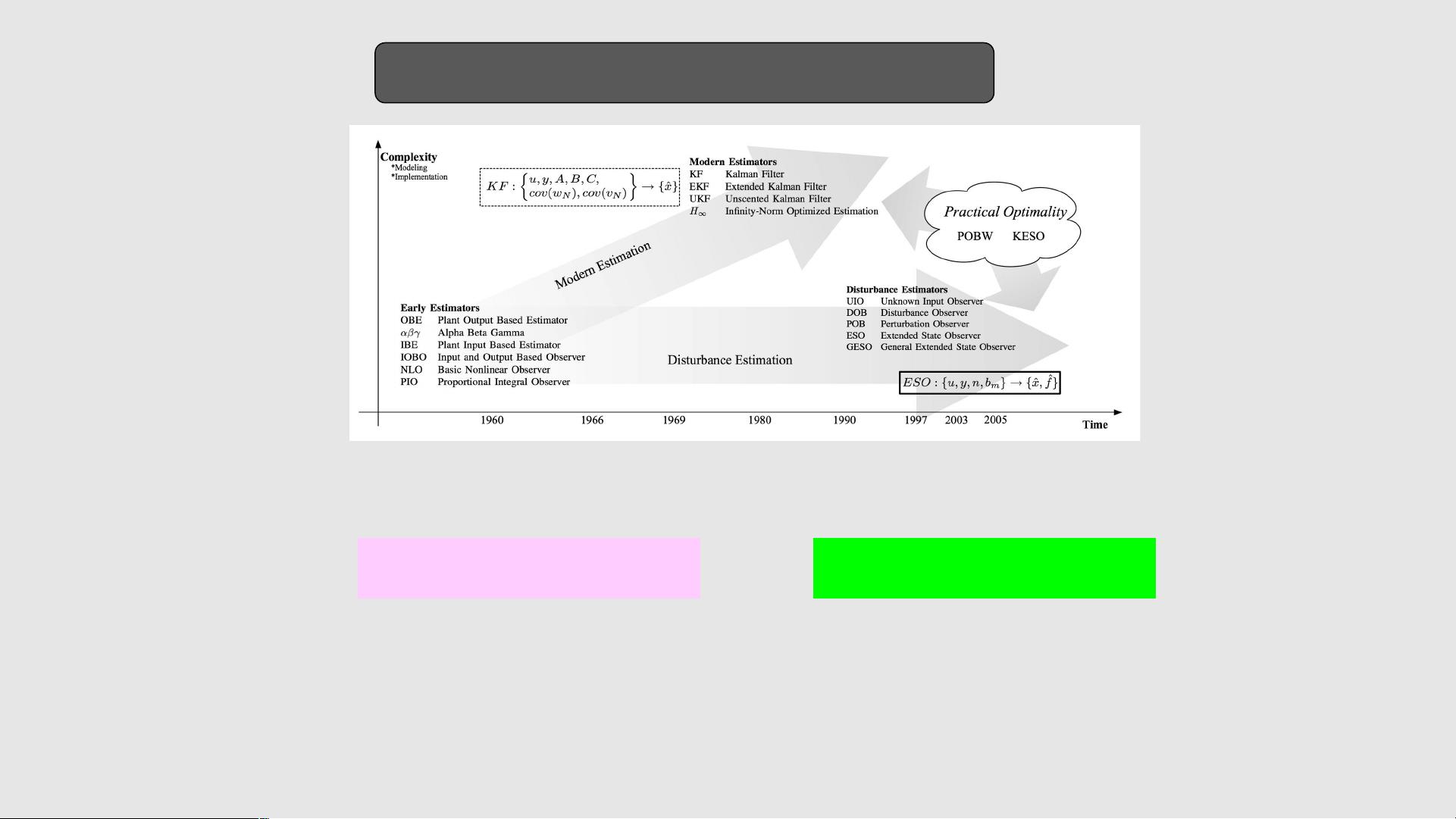
自抗扰控制器国内外研究现状
ADRC 具有自抗扰能力,对模型参数误差不敏感等优点,但算法
复杂,且可调节参数很多,这对 ADRC 的应用造成很大的障
碍。高志强教授在 2003 年提出了简化、归一化参数的 ADRC 设
计思想《 Scaling and bandwidth-parameterization based
controller tuning 》,为 ADRC 的工程应用提供了设计思路。其
后,在此基础上逐步形成了线性 ADRC 控制算法,并将其应用
于多种工业领域中。
1.On stability analysis of active disturbance rejection control for
nonlinear time-varying plants with unknown dynamics
2. A stability study of the active disturbance rejection control
problem by a singular perturbation approach
3. A practical approach to disturbance decoupling control[J].
Control Engineering Practice
4. Comparison of the DOB based control, a special kind of PID
control and ADRC
5. The active disturbance rejection control for a class of MIMO
block lower-triangular system
第 4 页 / 共 45 页



 weixin_451966392022-11-07资源内容总结地很全面,值得借鉴,对我来说很有用,解决了我的燃眉之急。
weixin_451966392022-11-07资源内容总结地很全面,值得借鉴,对我来说很有用,解决了我的燃眉之急。 qq_415701602022-06-10用户下载后在一定时间内未进行评价,系统默认好评。
qq_415701602022-06-10用户下载后在一定时间内未进行评价,系统默认好评。















