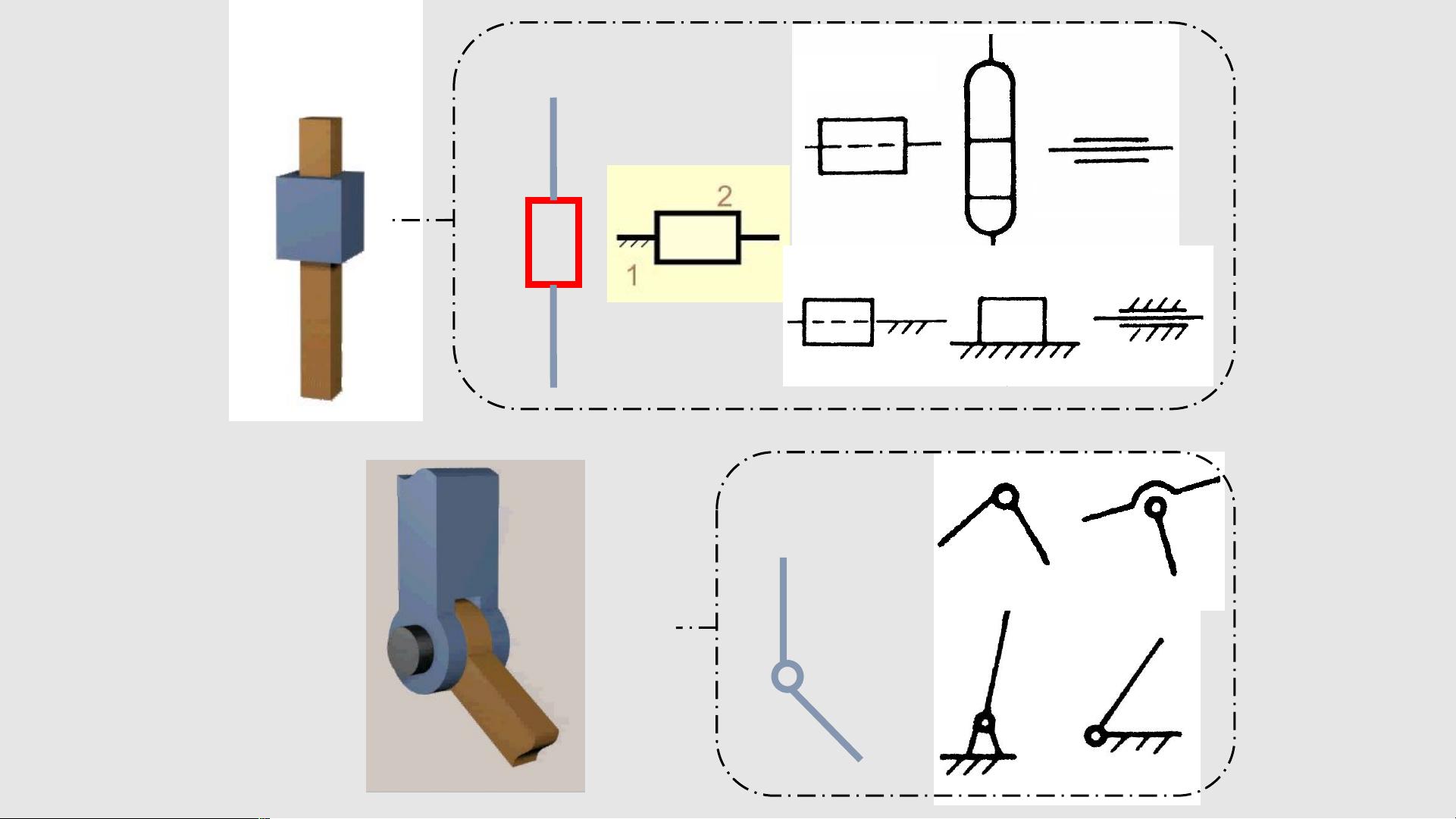
《机械原理》是一门深入研究机械运动规律的学科,它涉及到机械设计的基础理论。在学习这门课程时,首先需要理解基本概念,如机械、机器、机构、构件和零件。机械是利用力和能量进行工作的装置,而机器是能够转换或传递能量、实现预定运动的机械系统。机构是由若干个构件通过运动副连接在一起的部分,构件是机器的基本组成单元,而零件则是构成构件的单元。运动副则是构件间连接的方式,分为低副和高副,低副通常限制两个构件做平面内的相对运动,如滑块和导轨;高副则允许构件间有更复杂的运动,如齿轮副和凸轮副。
本章的重点是机构运动简图的绘制和自由度的计算。机构运动简图是一种简化表示机构运动特性的方法,用规定的运动副符号和线条来描绘各个构件及其相互连接。绘制简图时,需要对构件进行分类,确定原动件(提供动力的构件)、输出件(接收动力的构件)和传动件,明确所有构件的数量以及它们之间的运动副关系,选择合适的投影面和比例尺,最后用线条和标准符号来表示。
例如,在颚式碎矿机的案例中,曲轴作为原动件,通过转动副连接带动动颚板进行往复摆动,从而破碎矿石。绘制其机构运动简图可以帮助我们清晰地理解动力传递路径和各部件的相对运动。
平面机构具有确定运动的条件是机构分析中的关键点。机构自由度是指机构中活动构件相对于固定构件(机架)可以独立运动的维度数。自由度的计算遵循公式 F = 3n - 2PL - PH,其中 n 是活动构件数,PL 是低副数,PH 是高副数。例如,四杆机构和五杆机构的自由度计算表明,低副和高副的引入会约束构件的运动。
为了确保机构有确定的运动,必须满足两个条件:第一,机构自由度数 F 必须大于等于1,这意味着至少有一个构件可以独立运动;第二,原动件数目必须等于自由度数 F,这样才能形成运动链,使机构能从一个位置转移到另一个位置。
在计算自由度时,还需要注意一些特殊情况,如复合铰链,它是由三个或更多构件组成的转动副,每个复合铰链包含 (m-1) 个转动副。例如,如果一个机构中有7个构件,10个低副,则其自由度为1,表明这个机构有确定的运动。
《机械原理》课程中的机构运动简图绘制和自由度计算是理解机械运动和设计机械系统的基础。掌握这些知识对于工程实践和机械设计至关重要,因为它能帮助设计师直观地描绘和分析复杂机械的运动特性。