Dubins曲线.docx
需积分: 9 37 浏览量
2021-06-06
00:56:52
上传
评论
收藏 46KB DOCX 举报

Dubins 曲线原理见论文:Classcaon of the Dubins set。
文中图片引用于:hps://blog.csdn.net/clong139/arcle/details/83014865
代码可参考 GitHub:hps://github.com/EwingKang/Dubins-Curve-For-MATLAB
该文主要是自己对 Dubins 曲线的理解以及在求解过程中的一些思路的总结。
1、原理总述
Dubins 曲线是在不允许车辆倒车且考虑两点航向角的情况下,连接两点的最短光滑曲线。
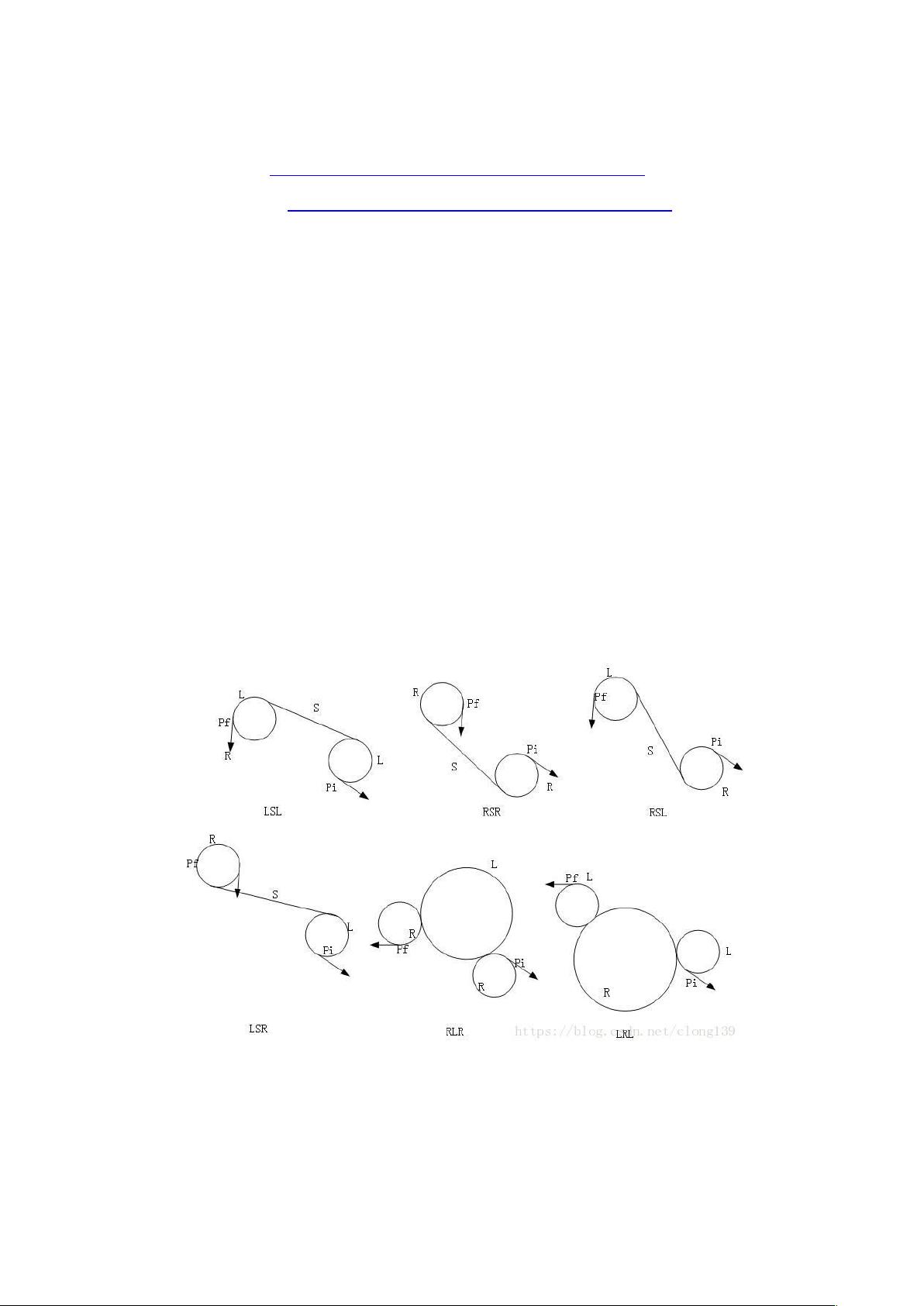
首先假定车辆的最小转弯半径为 r,则 Dubins 曲线由圆弧+直线+圆弧或者圆弧+圆弧+圆弧
组成,每段圆弧的半径都为 r,且每段圆弧对应的角度都应该在[0,2π)之间。前者简称为
CSC,后者简称 CCC。CSC 总共有四种情况:LSL、LSR、RSL、RSR,L 表示向左转,S 表示直
行,R 表示向右转。CCC 总共有两种情况:LRL、RLR。当两点间的距离较远时,CCC 类型曲
线可能是没有解的,而当两点间的距离较近时,CCC 的每种情况可能会有两个解,也就是
说 LRL 和 RLR 每种类型都会有两个解。而这两个解中,LRL 应该是 R 圆弧对应的角度大于 π
的解距离较短,RLR 应该是 L 圆弧对应的角度大于 π 的解距离较短。

qq_15622221
- 粉丝: 0
- 资源: 2












评论0