卡尔曼滤波
需积分: 0 54 浏览量
2012-05-29
17:02:03
上传
评论
收藏 260KB PDF 举报


第六章 卡尔曼滤波(The Kalman filtering)
通过前面几节内容的学习,我们知道维纳滤波是根据当前 和过去全部的观测值
来估计信号的当前值 ,它的解形式是以均方误差最小为原则下的
系统的传递函数 或单位脉冲响应 。而卡尔曼滤波不需要过去全部的观测值,它
是根据前一个估计值 和最近一个观测值 来估计信号的当前值 ,它是用状
态方程和递推方法进行估计的,因而卡尔曼滤波对信号的平稳性和时不变性不做要求。我们
利用维纳滤波的模型引入到卡尔曼滤波的信号模型。
)(nx
L),2(),1( −− nxnx )(ns
)(zH )(nh
)1(
ˆ
−ns )(nx )(
ˆ
ns
第一节 信号模型
6.1.1 状态方程和量测方程
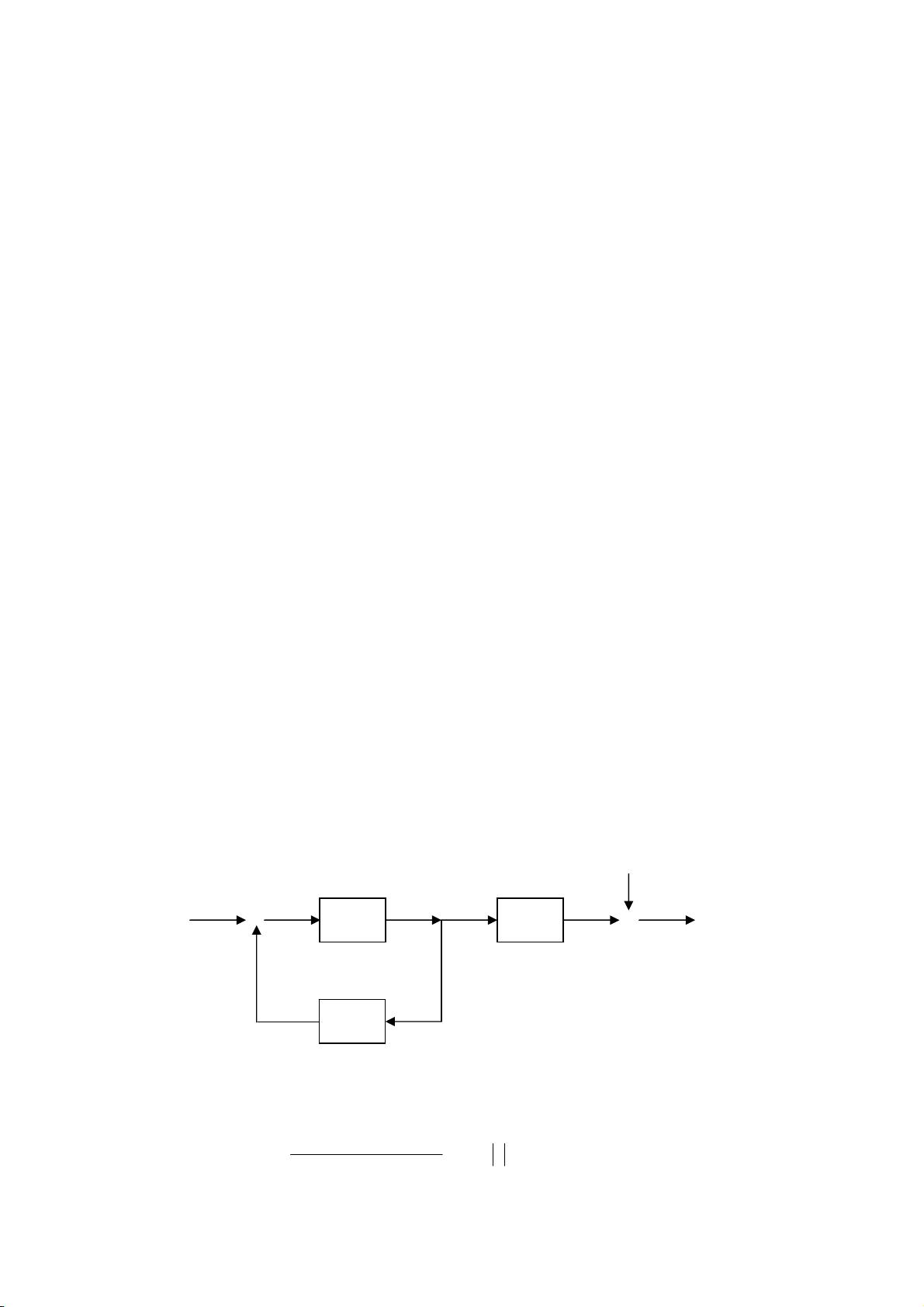
要给出卡尔曼滤波的信号模型,先来讨论状态方程和量测方程。图 5.11 是维纳滤波的
模型,信号 可以认为是由白噪声 激励一个线性系统 的响应,假设响应和激
励的时域关系可以用下式表示:
)(ns
)(
1
nw
)(zA
)1()1()(
1
−
+
−
=
nwnasns
(6-52)
上式也就是一阶 AR 模型。在卡尔曼滤波中信号 被称为是状态变量,用矢量的形式表
示为 ,在 k 时刻的状态用
S(k)
表示,在 k-1 时刻的状态用
)(ns
S(k) 1)S(k
−
表示。激励信号
也用矢量表示为 ,激励和响应之间的关系用传递矩阵 来表示,它是由系
统的结构确定的,与 有一定关系。有了这些假设后我们给出状态方程:
)(
1
nw (k)w
1
A(k)
)(zA
1)(kw1)A(k)S(kS(k)
1
−
+
−
=
(6-53)
上式表示的含义就是在 k 时刻的状态 可以由它的前一个时刻的状态 来求得,
即认为 k-1 时刻以前的各状态都已记忆在状态
S(k) 1)S(k −
1)S(k
−
中了。
)(ns
)(zA
)(
1
nw
)(ns
)(zA
)(
1
nw
)(nw
⊕
)(nx

剩余10页未读,继续阅读













评论0