直线二级倒立摆建模与matlab仿真LQR.doc
版权申诉

直线二级倒立摆建模与仿真
1、直线二级倒立摆建模
为进行性线控制器的设计,首先需要对被控制系统进行建模.二级倒立摆系统数学模型的建立
基于以下假设:
1) 每一级摆杆都是刚体;
2) 在实验过程中同步带长保持不变;
3) 驱动力与放大器输入成正比,没有延迟直接拖加于小车;
4) 在实验过程中动摩擦、库仑摩擦等所有摩擦力足够小,可以忽略不计。
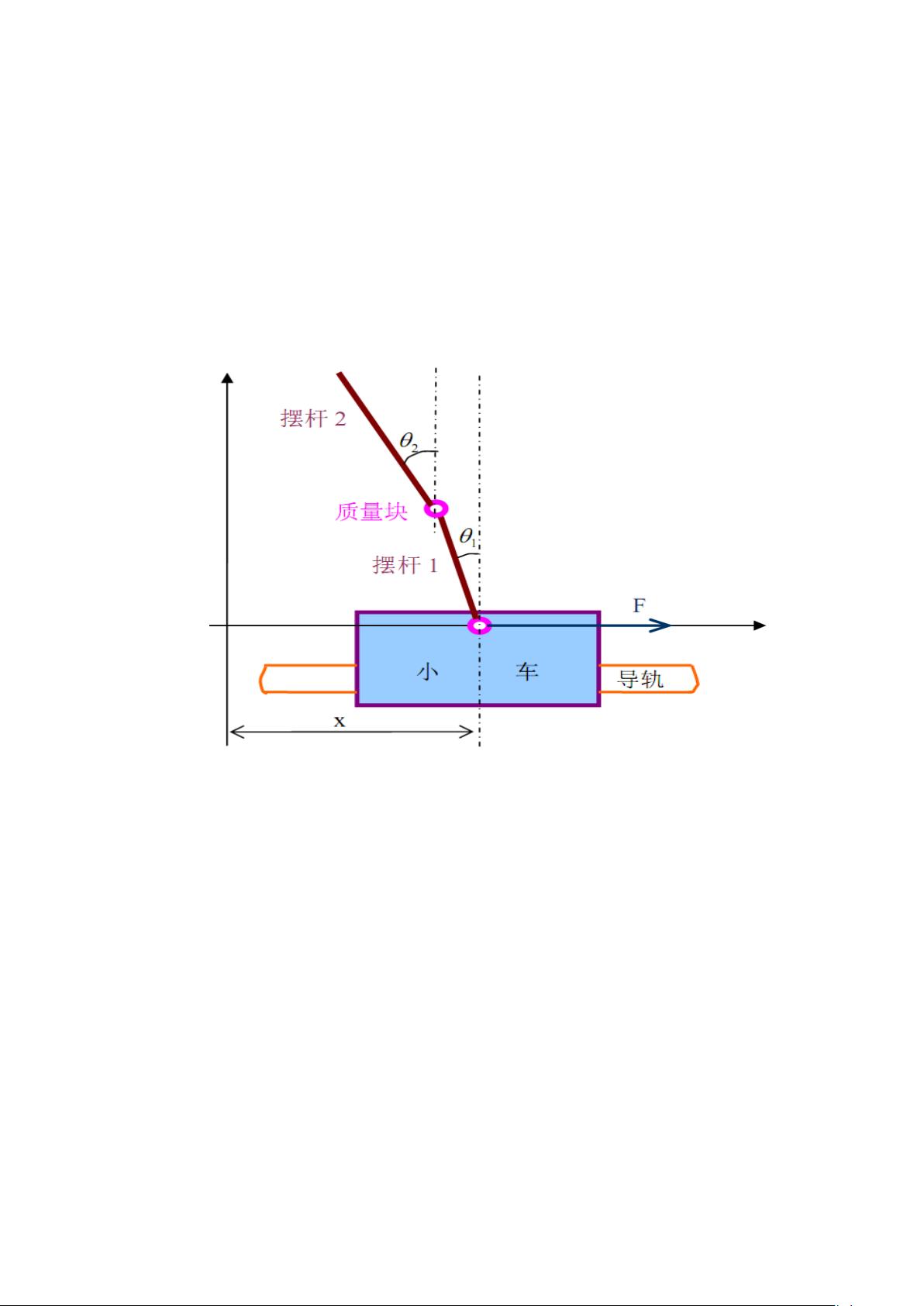
图 1 二级摆物理模型
二级倒立摆的参数定义如下:
M 小车质量
m
1
摆杆 1 的质量
m
2
摆杆 2 的质量
m
3
质量块的质量
l
1
摆杆 1 到转动中心的距离
l
2
摆杆 2 到转动中心的距离
θ
1
摆杆 1 到转动与竖直方向的夹角
θ
2
摆杆 2 到转动与竖直方向的夹角
F 作用在系统上的外力
利用拉格朗日方程推导运动学方程
拉格朗日方程为:
资源评论

 TMshy2024-04-23资源很不错,内容和描述一致,值得借鉴,赶紧学起来!
TMshy2024-04-23资源很不错,内容和描述一致,值得借鉴,赶紧学起来!
oligaga
- 粉丝: 50
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











