三自由度机器人结构设计说明书.pdf
版权申诉
201 浏览量
2022-07-12
01:26:40
上传
评论 1
收藏 1.16MB PDF 举报


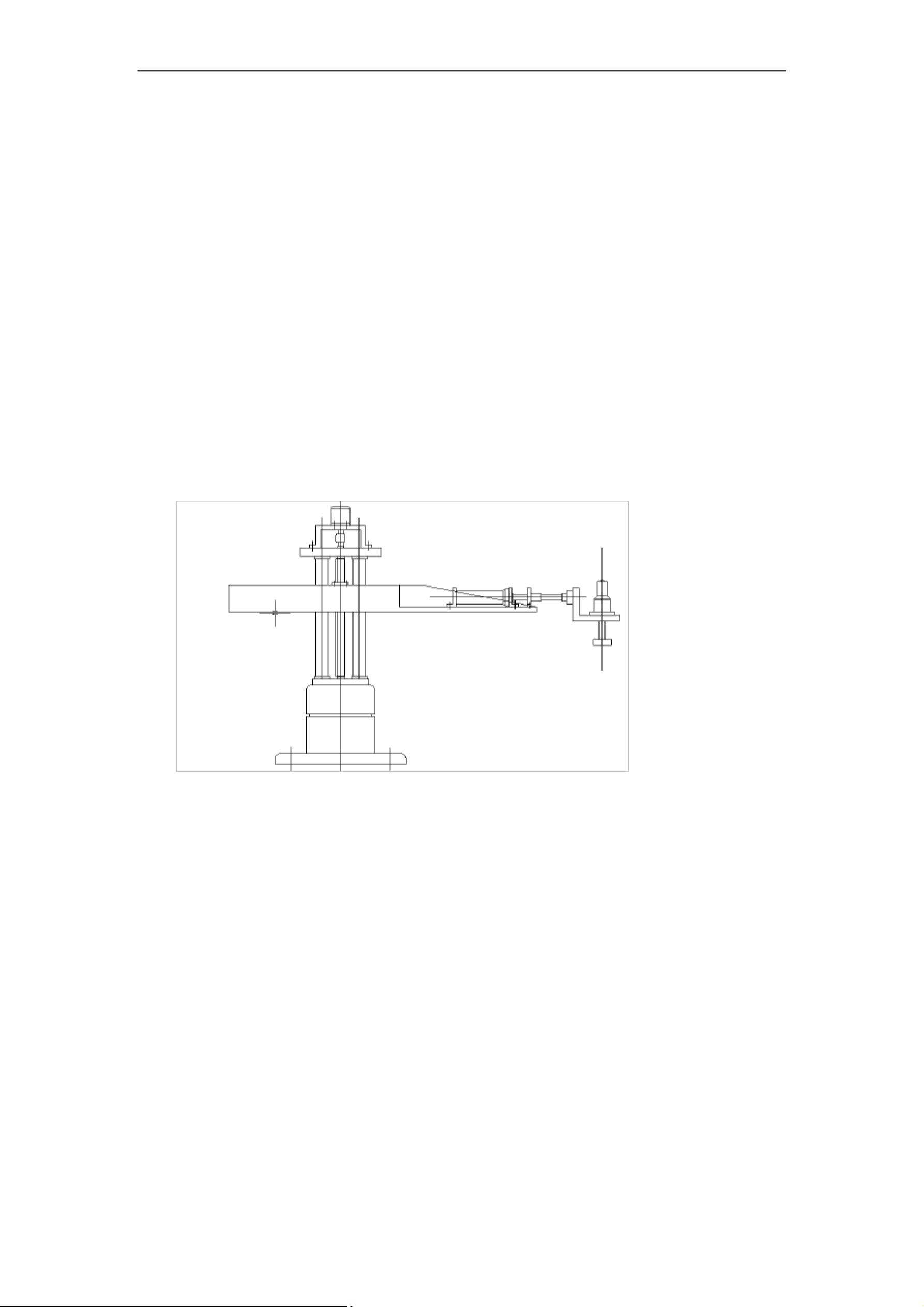
三自由度圆柱坐标型工业机器人
目 录
目录 …………………………………………………………………………………………… 1
中文摘要 ……………………………………………………………………………………… 2
Abstract ……………………………………………………………………………………… 2
第 1 章 绪论 ……‥………………………………………………………………………… 3
第 2 章 工业机器人的总体设计 …………………………………………………………… 3
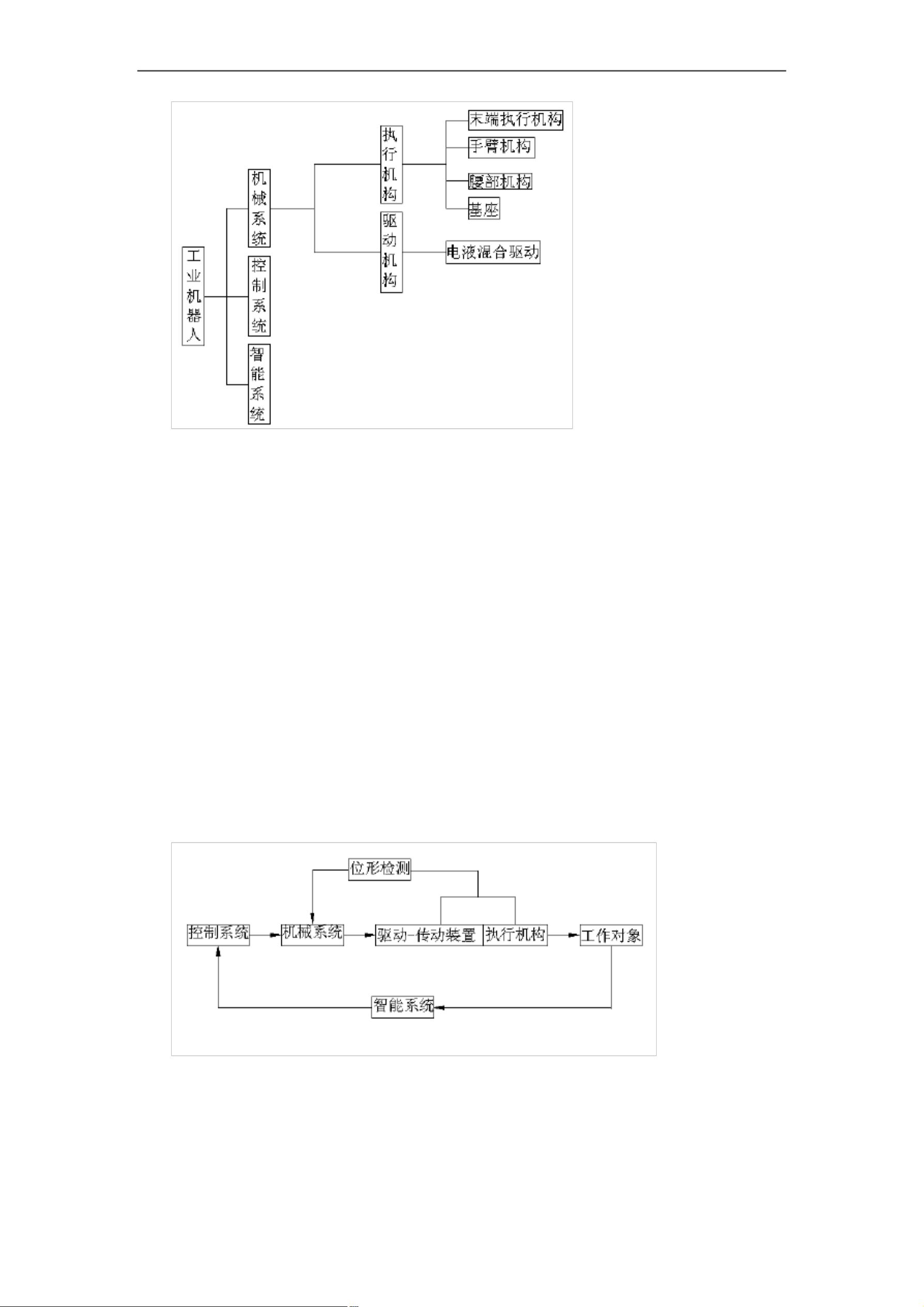
2.1 工业机器人的组成及各部分关系概述 …………………………………………… 3
2.2 工业机器人的设计分析 ……………………………………………………………… 4
2.2.1 设计要求 ………………………………………………………………………… 5
2.2.2 总体方案拟定 …………………………………………………………………… 5
2.2.3 工业机器人的主要技术参数 ………………………………………………… 5
第 3 章 工业机器人的机械系统设计 ……………………………………………………… 6
3.1 工业机器人的运动系统分析 ……………………………………………………… 6
3.1.1 机器人的运动概述 ……………………………………………………………… 6
3.1.2 机器人的运动过程分析 ……………………………………………………… 7
3.2 工业机器人的执行机构设计 ……………………………………………………… 8
3.2.1 末端执行机构设计 ……………………………………………………………… 8
3.2.2 手臂机构设计 ………………………………………………………………… 11
3.2.3 腰部和基座设计 ………………………………………………………………… 12
3.3 工业机器人的机械传动装置设计 ‥……………………………………………… 18
3.3.1 滚珠丝杠的选择 ………………………………………………………………… 18
3.3.2 谐波齿轮的选择 ………………………………………………………………… 19
3.3.3 联轴器的选择 ………………………………………………………………… 20
第 4 章 工业机器人的计算机控制系统概述 ……………………………………………… 20
4.1 工业机器人控制系统的特点及对控制功能的基本要求 ‥……………………… 21
4.2 计算机控制系统的设计方案 ……………………………………………………… 22
4.3 硬件电路的组成 ………………………………………………………………… 22
第 5 章 工业机器人运行时应采取的安全措施 …………………………………………… 22
5.1 安全要求 ………………………………………………………………………… 22
5.2 实施方法 …………………………………………………………………………… 23
鸣谢 ……………………………………………………………………………………… 23
………………………………………………………………………………… 24参考文献
- 1 -


剩余23页未读,继续阅读
资源评论













