01 第1章 控制系统状态空间表达式(4:3).pptx

需积分: 0 89 浏览量
更新于2024-03-04
收藏 12.79MB PPTX 举报
### 控制系统状态空间表达式概述
#### 1.1 状态变量及状态空间表达式
**1.1.1 状态变量性质**
状态变量是一组可以唯一确定系统当前状态的变量集合。对于一个给定的系统,状态变量的选择不是唯一的,但必须满足以下条件:
- 必须能够充分描述系统在任意时刻的状态。
- 是一组最小数量的变量,能够完全确定系统状态。
**1.1.2 状态矢量**
如果系统的状态由\( n \)个状态变量组成,这些变量可以被看作一个\( n \)-维向量\(\mathbf{x}\),即状态矢量。例如,如果一个系统有两个状态变量\( x_1 \)和\( x_2 \),则状态矢量可以表示为\(\mathbf{x} = [x_1, x_2]^T\)。
状态矢量\(\mathbf{x}(t)\)随时间变化,且在任意时刻\( t \)的状态\(\mathbf{x}(t)\)可以通过初始状态\(\mathbf{x}(t_0)\)和从\( t_0 \)到\( t \)的所有输入\(\mathbf{I}(t)\)来确定。数学上可以表示为:
\[ \mathbf{x}(t) = f(\mathbf{x}(t_0), \mathbf{I}(t)) \]
**1.1.3 状态空间**
状态空间是由所有可能的状态矢量构成的\( n \)-维空间。每一个状态变量对应一个坐标轴,因此状态空间是一个几何空间,其中的每一点代表系统的一个可能状态。
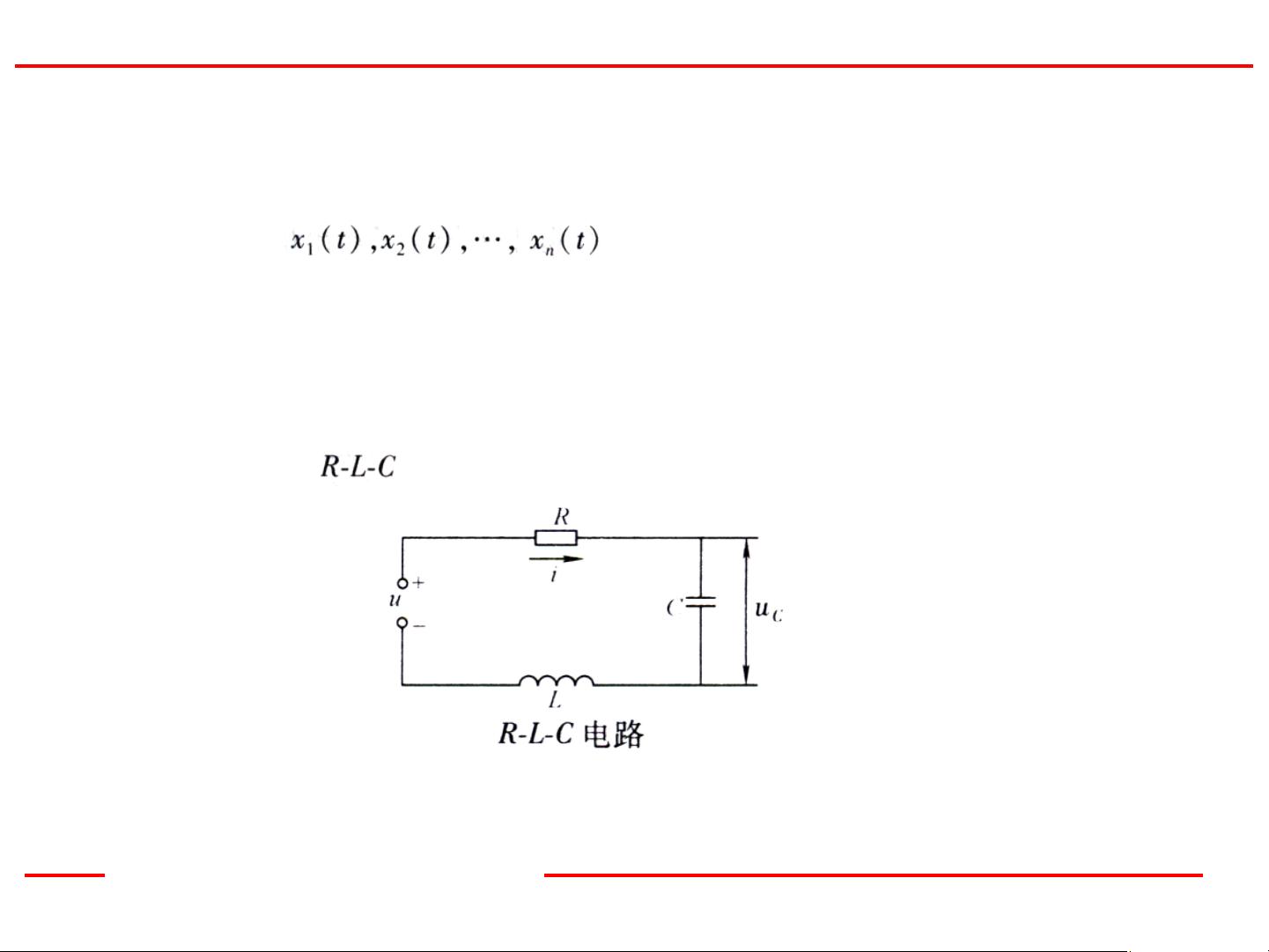
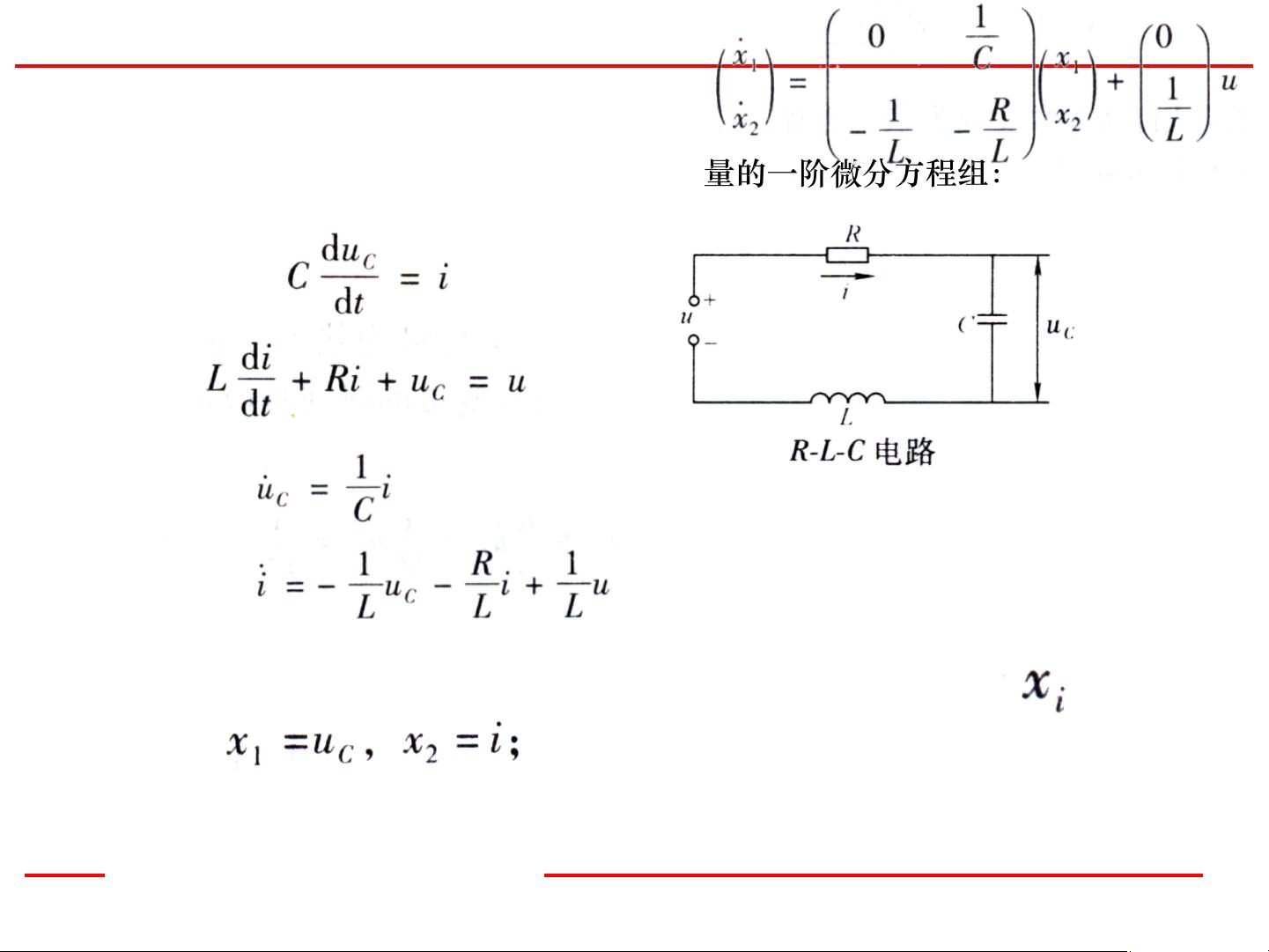
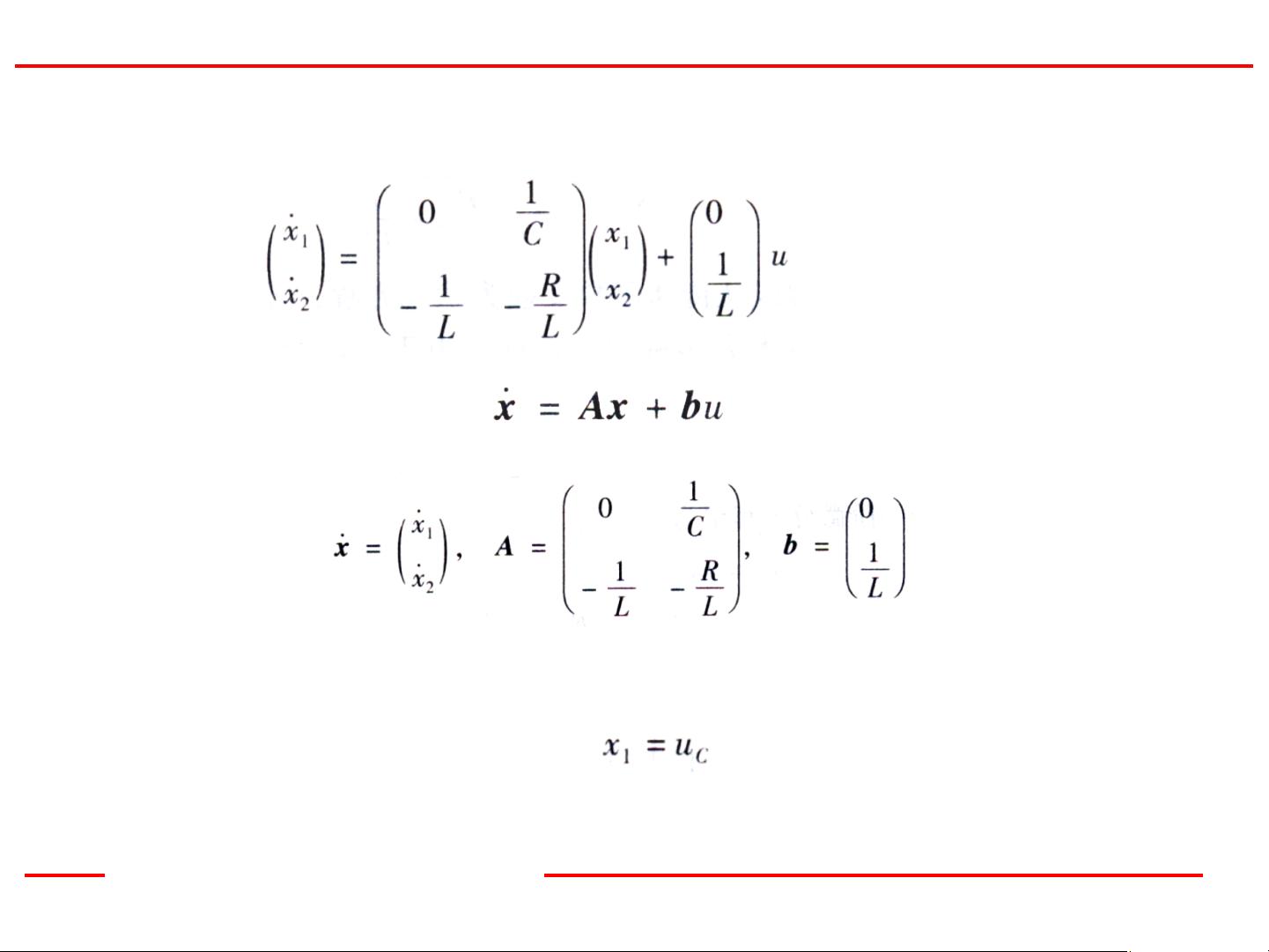
**1.1.4 状态方程**
状态方程是描述系统状态变化规律的一阶微分方程组。假设一个简单的例子,如图所示的电路,可以写出两个包含状态变量的一阶微分方程组:
\[ \dot{x}_1 = -\frac{1}{RC}x_1 + \frac{1}{C}u \]
\[ \dot{x}_2 = -\frac{1}{RC}x_2 + \frac{1}{C}x_1 \]
这里,\( u \)是输入信号,\( R \)和\( C \)分别是电阻和电容值。\(\dot{x}_1\)和\(\dot{x}_2\)分别是状态变量\( x_1 \)和\( x_2 \)关于时间的导数。将状态方程写成矢量矩阵形式,可以简化为:
\[ \dot{\mathbf{x}} = A\mathbf{x} + B\mathbf{u} \]
**1.1.5 输出方程**
输出方程描述了系统输出与状态变量之间的关系。例如,对于上面的例子,如果输出\( y \)定义为\( x_2 \),则输出方程可以写为:
\[ y = C^T\mathbf{x} + D\mathbf{u} \]
**1.1.6 状态空间表达式**
状态空间表达式由状态方程和输出方程组成,是描述系统动态行为的一种强大工具。对于单输入单输出的系统,状态空间表达式的一般形式为:
\[ \dot{\mathbf{x}} = A\mathbf{x} + B\mathbf{u} \]
\[ \mathbf{y} = C^T\mathbf{x} + D\mathbf{u} \]
对于多输入多输出系统,状态空间表达式的矢量矩阵形式为:
\[ \dot{\mathbf{x}} = A\mathbf{x} + B\mathbf{u} \]
\[ \mathbf{y} = C\mathbf{x} + D\mathbf{u} \]
其中,\(\mathbf{x}\)为\( n \)-维状态矢量,\( A \)为\( n \times n \)系统矩阵,\( \mathbf{u} \)为\( r \)-维输入矢量,\( \mathbf{y} \)为\( m \)-维输出矢量,\( B \)、\( C \)和\( D \)为适当的矩阵。
#### 1.2 状态变量及状态空间表达式的模拟结构图
状态空间表达式的模拟结构图是一种图形化表示方法,用于直观展示系统内部信号的流动情况。绘制模拟结构图的基本步骤包括:
- 确定所需的积分器数量,这应该与状态变量的数量相同;
- 根据状态方程和输出方程绘制加法器和比例器;
- 使用箭头将这些组件连接起来,形成完整的系统模型。
例如,对于一个简单的一阶系统,其状态方程为\(\dot{x} = ax + bu\),模拟结构图可以通过一个积分器和几个比例器和加法器来实现。
通过上述介绍可以看出,状态空间表达式为控制系统分析提供了一种强有力的数学框架,不仅可以清晰地表示系统的动态特性,还便于进行进一步的分析和设计。
资源评论


m0_70454388
- 粉丝: 0
- 资源: 1









最新资源
- MGB-xCPU.pdf
- “家庭教育促进法“家长会讲座教案课件.pptx
- “传承家风家训”教案课件模板.pptx
- “节能减排”讲座教案课件.pptx
- ”防震减灾“校园安全教育讲座教案课件模板.pptx
- ”节约用水“班会讲座教案课件模板.pptx
- ”心理健康,让记忆变得更高效“高中生班会教案课件模板.pptx
- 基于SSM框架的在线购物推荐系统设计与实现:协同过滤技术的应用
- 掼蛋环境中基于PyTorch的mappo算法实现与自博弈训练-含可运行代码
- 2024数据分析岗招聘数据的探索.zip
- 俄罗斯酒精人均消费数据(2017-2023年).zip
- 关于酒的二分类数据集.zip
- 2025绿豆U8APP源码
- MATLAB机器学习多模型综合探究指标间关系及关键因素筛选方法(含代码及解释)
- 华为数通HCIE-R&S网络工程师面试宝典V3.0(经典)
- FFmpegH.264 格式分析 ② ( 网络抽象层单元 NALU - NALU 功能结构 - VCL 视频编码层 - NAL 网络提取层 - H.264 封装模式 - annexb 模式 )
