Kalman滤波原理及程序(指导手册).docx
版权申诉
173 浏览量
2022-05-27
08:39:29
上传
评论
收藏 579KB DOCX 举报

Kalman 滤波原理及程序(手册)
KF/EKF/UKF 原理+应用实例+MATLAB程序
本手册的研究内容主要有 Kalman 滤波,扩展 Kalman 滤波,无迹 Kalman
滤波等,包括理论介绍和 MATLAB 源程序两部分。本手册所介绍的线性滤波
器,主要是 Kalman 滤波和α -β 滤波,交互多模型 Kalman 滤波,这些算法的应
用领域主要有温度测量、自由落体, GPS 导航、石油地震勘探、视频图像中的
目标检测和跟踪。
EKF 和 UKF 主要在非线性领域有着重要的应用,目标跟踪是最主要的非线
性领域应用之一,除了讲解目标跟踪外,还介绍了通用非线性系统的 EKF 和
UKF 滤波处理问题,相信读者可以通过学习本文通用的非线性系统,能快速掌
握 EKF 和 UKF 滤波算法。
本文所涉及到的每一个应用实例,都包含原理介绍和程序代码(含详细的
中文注释)。
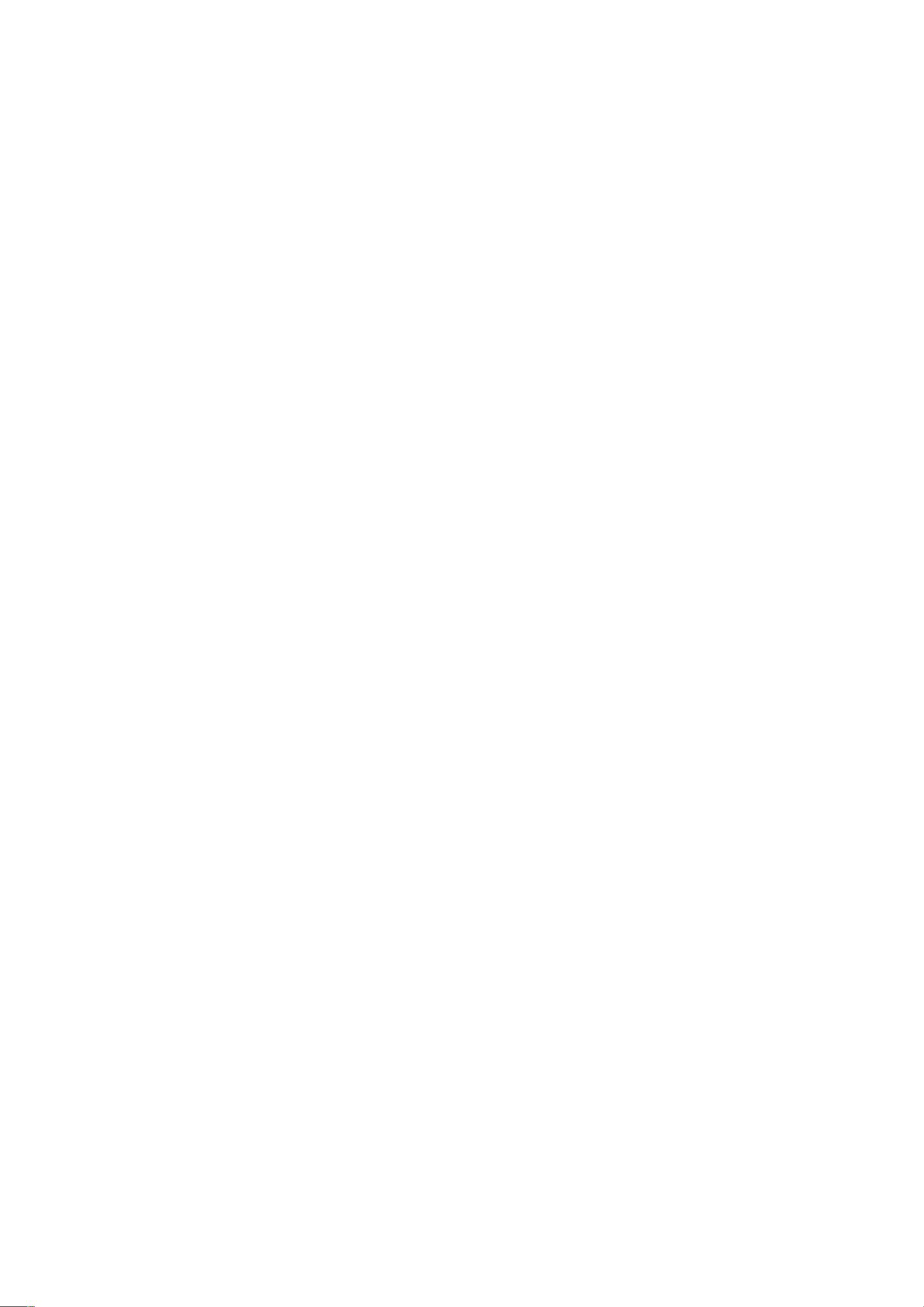
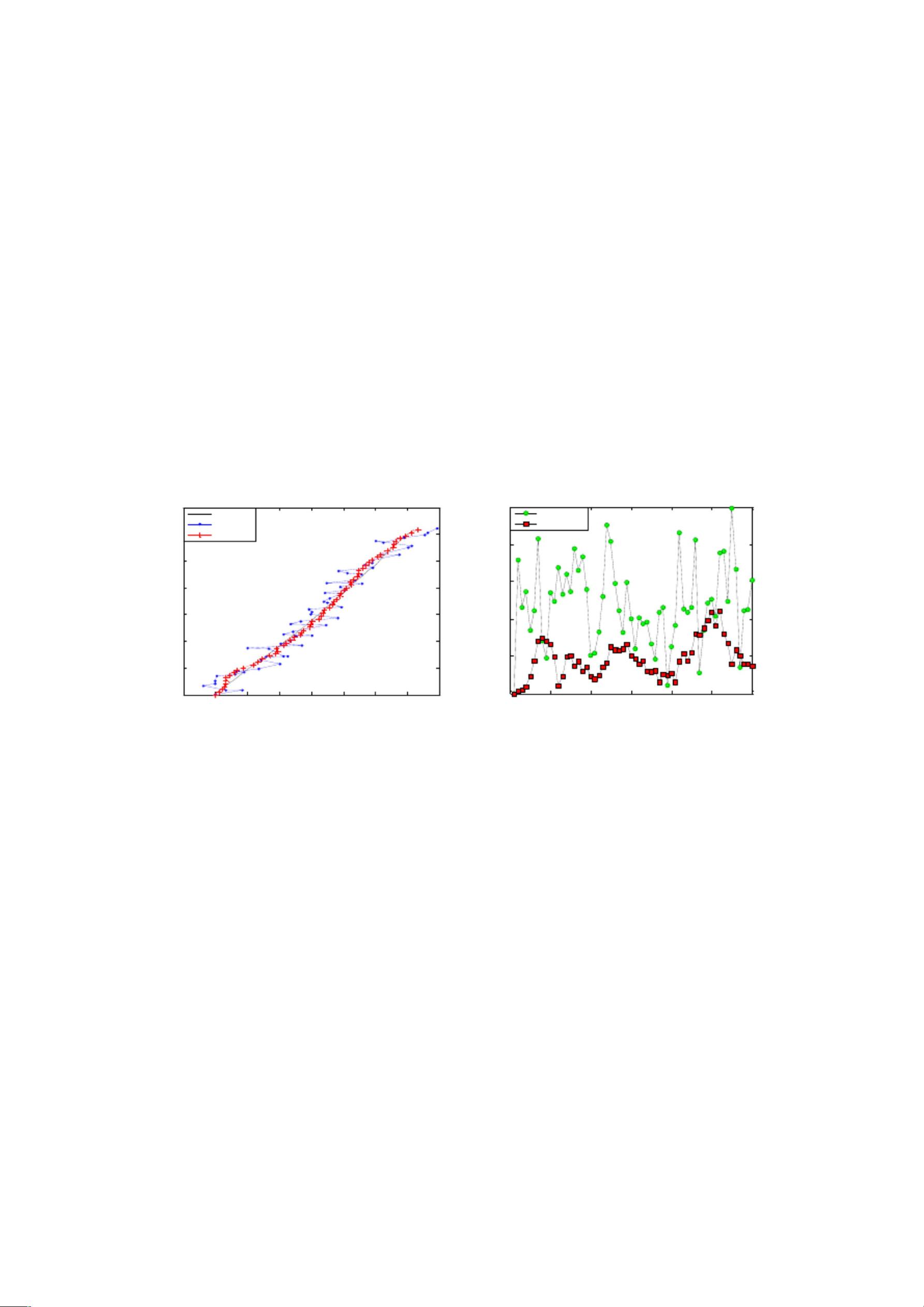
一、四维目标跟踪 Kalman 线性滤波例子
在不考虑机动目标自身的动力因素,将匀速直线运动的船舶系统推广到四
维,即状态 ( ) ( ) �( ) ( ) �( ) 包含水平方向的位置和速度和纵向
X k x k x k y k y k T
的位置和速度。则目标跟踪的系统方程可以用式(3.1)和(3.2)表示,
X (k 1) X (k) u(k)(2-4-9)
Z(k) HX (k) v(k)(2-4-10)
1 T 0 0
0.5
0
1 0
T
0 0
T
2
0 1 0 0
T
0
0
0
其 中 ,
,
, H
,
0 1
0 0 1
T
0.5
T
2
0 0 0 1
0 0
T
x
T
�
x
x
X
, Z
,u,v 为零均值的过程噪声和观测噪声。 T 为采样周期。为
y
y
�
y
了便于理解,将状态方程和观测方程具体化:

剩余12页未读,继续阅读
资源评论













