【老生谈算法】matlab实现基于粒子群算法的PID控制器优化设计.doc
版权申诉

基于粒子群算法的 PID 控制器优化设计
1、案例背景
PID 控制器的性能取决于 Kp、Ki、Kd 这 3 个参数是否合理,因此,优化 PID 控制器参数具
有重要意义。目前,PID 控制器参数主要是人工调整,这种方法不仅费时,而且不能保证获
得最佳的性能。PSO 已经广泛应用于函数优化、神经网络训练、模式分类、模糊系统控制
以及其它应用领域,本案例将使用 PSO 进行 PID 控制器参数的优化设计。
3、案例实例及结果:
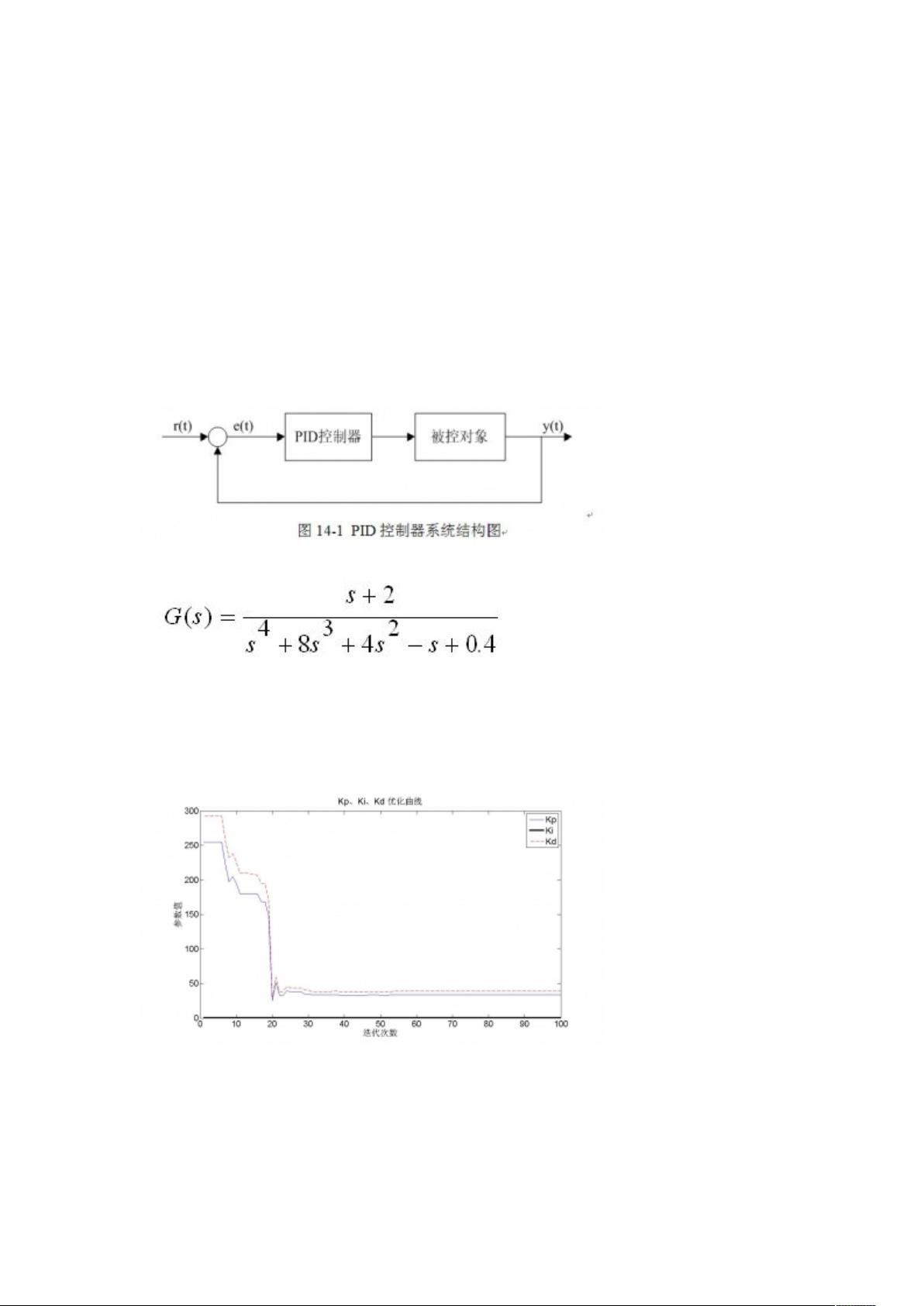
PID 控制器的系统结构图如图 14-1 所示。
选取的被控对象为以下不稳定系统:
运行代码,得到优化过程如图 14-4 和图 14-5 所示,前者为 PID 控制器 3 个参数 Kp、Ki、Kd
的变化曲线,后者为性能指标 ITAE 的变化曲线。得到的最优控制器参数及性能指标为
Kp= 33.6469,Ki= 0.1662,Kd= 38.8063,
ITAE= 1.0580,
将以上参数代回如图 14-2 所示的模型,得到的单位阶跃响应曲线如图 14-6 所示。
资源评论

 lqcx123452023-12-22这里面是不是缺少pso-pid函数
lqcx123452023-12-22这里面是不是缺少pso-pid函数












