了充足的动机。由于它的特性,设想这样的设计可能成为一个可重构制造工厂的一部
分,作为一个机器人加工中心的一部分。它固有的优势,混合性(较大的工作空间)和
自我重构性(一些变化的属性)可以帮助弥补实验室和工业之间的差距。
2. 现代技术
本节简要概述了目前最先进的与 ReSI-BOT 相关的现代技术。在柔性和可重构
制造业,一些可重构的并联机器人系统已进行了研究。一些可以在这些文献中找
到[12 - 15 7 8]。从本质上讲,这些可重构机器人系统是并联机构,可以调整架构,
以实现不同的运动属性。提出的机器人相关的并联机器臂的运动学和结构的研究
在这些文献[ 16-18 ]中可以找到。在这个文献中[16]中,精度是研究的重点。作
者探讨了并行机器人架构的使用,以推进微系统的自动化。由于微电子传感器领
域的大发展,有许多潜在的应用。此外,有趣的是,在这个文献中[ 18 ]提出的混
合设计的合成。该方法是基于杆组的基本构建块。此外,也有一些有趣的混合设
计的研究。在这些文献中,一些混合型并联机器人已经提出[ 10,6,19,11,20,21 ]。
Merlet[3]将混合结构分为两类。机械臂的行为类似于 Alizade[10]提出的结构是
一个类别和机械臂的行为类似于这个文献中[19]提出的结构作为另一个类别。
并联机器人结构的奇异性分类是设计和功能的重要元素,研究者围绕这一
主题和许多参数[3,22–26]。目前的研究与 Ebert-Uphoff 等人的研究直接相关。
在这个文献[23]中他提出了一类特殊的机器人可以通过分析特征的四面体分析。
同时,并联机器臂的工作空间计算的相关研究可以在这些文献中[27,28]找到。很
多时候,在确定工作区时考虑奇异点分析。
在设计和现有的分析中,并联机器臂的刚度是一个重要测量参数。这是一个
规范的假设,该机制的灵活性是局部的活动关节。然后,笛卡尔刚度将取决于直
接的端部执行器的状态。假定连接是完美的完全刚性和被动关节 [ 29 ]。对于串
行机械臂,这个构想来源于 Salisbury [30]的工作,由 Gosselin 扩展到并联机器
臂[31]。
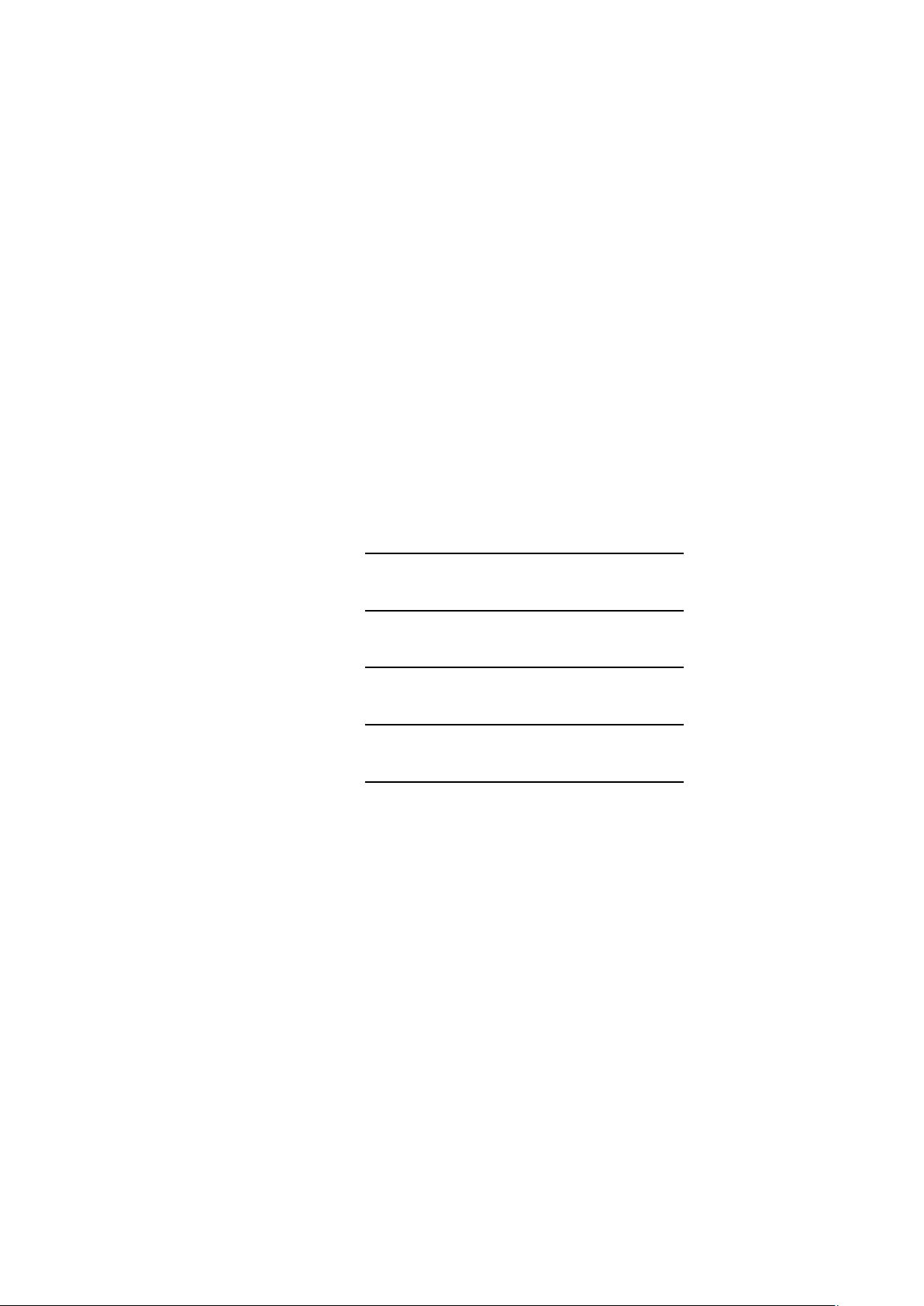
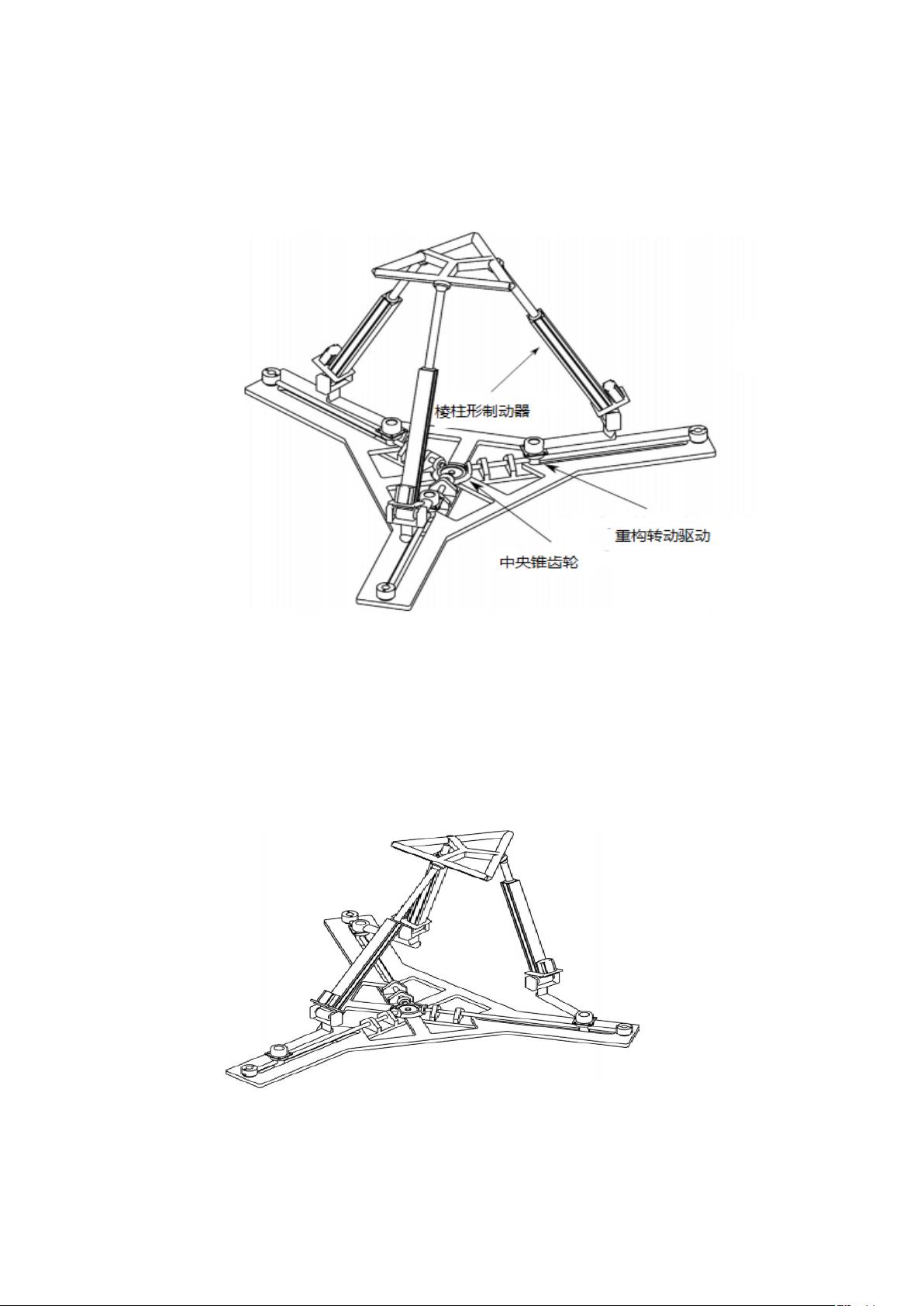
3. 流动性和几何描述
图 1 显示了 ReSl-Bot,它由三个肢体组成。每个肢体都是相同的,有两个转动
关节,一个移动关节,一个球形关节。它们排列的顺序标准(转动–转动–棱柱–球
形)在第一转动副和移动关节的驱动。重要地是设计采用了齿轮传动系统,使机器人