目 录
前言........................................................................................................................................3
(一)、机器人的大脑.............................................................................................3
(二)、机器人的眼睛耳朵.....................................................................................3
(三)、机器人的腿——驱动器与驱动轮.............................................................4
(四)、机器人的手臂——机械传动专制.............................................................5
(五)、机器人的心脏——电池.............................................................................5
一、AT89S51
单片机简介....................................................................................................6
(一)、AT89S51 主要功能列举如下:.................................................................6
(二)、AT89S51 各引脚功能介绍:.....................................................................6
二、控制系统电路图...............................................................................................................9
三、微型伺服马达原理与控制.............................................................................................10
(一)、微型伺服马达内部结构...........................................................................10
(二)、微行伺服马达的工作原理.......................................................................10
(三)、伺服马达的控制.......................................................................................11
(四)、选用的伺服马达.......................................................................................11
四、红外遥控.........................................................................................................................12
(一)、 红外遥控系统.........................................................................................12
(二)、 遥控发射器及其编码.............................................................................12
(三)、红外接收模块...........................................................................................13
(四)、红外解码程序设计...................................................................................13
五、控制程序.........................................................................................................................14
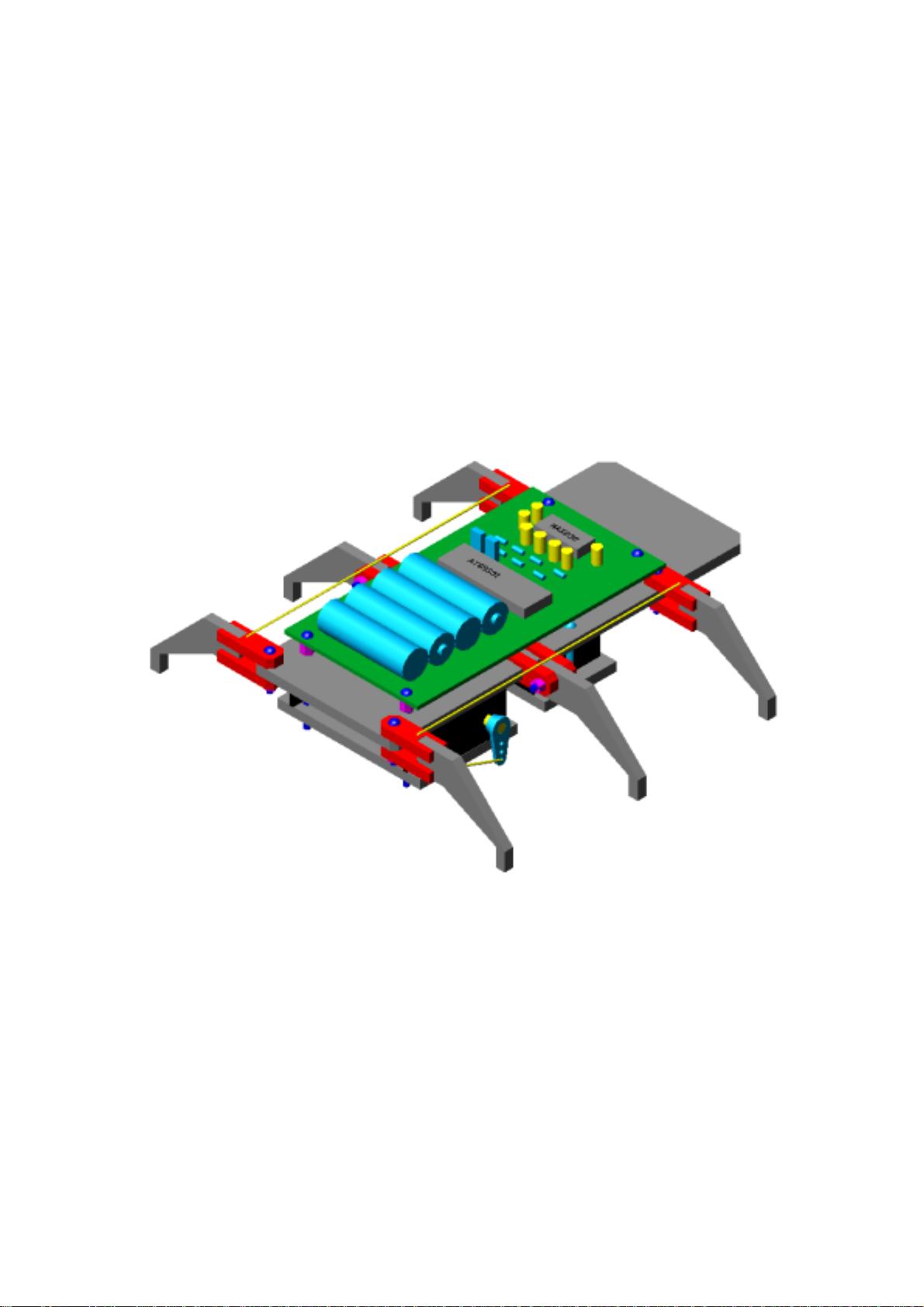
六、六足爬虫机器人结构设计图.........................................................................................20
2