


1
六足爬虫机器人设计
设计人:李海鹰
日期:2004 年 9 月 30 日

2
目 录
前言.........................................................................................................................................2
(一)、机器人的大脑..............................................................................................2
(二)、机器人的眼睛耳朵......................................................................................2
(三)、机器人的腿——驱动器与驱动轮..............................................................3
(四)、机器人的手臂——机械传动专制..............................................................4
(五)、机器人的心脏——电池..............................................................................4
一、AT89S51 单片机简介 ....................................................................................................5
(一)、AT89S51 主要功能列举如下:.................................................................5
(二)、AT89S51 各引脚功能介绍:.....................................................................5
二、控制系统电路图................................................................................................................7
三、微型伺服马达原理与控制................................................................................................8
(一)、微型伺服马达内部结构..............................................................................8
(二)、微行伺服马达的工作原理..........................................................................8
(三)、伺服马达的控制..........................................................................................9
(四)、选用的伺服马达..........................................................................................9
四、红外遥控..........................................................................................................................11
(一)、 红外遥控系统..........................................................................................11
(二)、 遥控发射器及其编码..............................................................................11
(三)、红外接收模块............................................................................................11
(四)、红外解码程序设计....................................................................................11
五、控制程序..........................................................................................................................12
六、六足爬虫机器人结构设计图..........................................................................................18

3
前言
今年年初,学校为参加中央电视台举办的第三届全国大学生机器人电视大赛,
组建了机器人制作小组。我积极参加,有幸成为了其中的一员。因为我们以前没
有参加过类似的比赛,也没有制作机器人的经验。可以说我们什么都是从零开始,
边学习边制作。通过这半年多的制作过程,我从中学到了很多书本上学不到的东
西,也得到了很好的学习与锻炼的机会。
最初,我们组建了机器人制作实验室。到五金机电市场购买了必要的工具和
一些制作材料。然后开始制作实验机器人的身体——框架。
实验机器人的框架我们是使用轻型万能角钢制作的,这种角钢的两侧都有间
隔均匀的孔槽,可以很方便的用螺栓进行连接。用不同长度的角钢组合后,就可
以得到不同大小的立方体和长方体及多边形。机器人身体的框架就搭建好了。在
它的上面将装上:机器人的大脑——可编程控制器、机器人的眼睛耳朵——传感
器、机器人的腿——驱动轮、机器人的手臂——机械传动专制、机器人的心脏
——电池……之所以使用轻型万能角钢,主要是因为是在制作试验机型,而轻型
万能角钢安装拆卸方便和便于修改长度,调整设计。
实验机器人定型后,就照其尺寸用不锈钢方管焊接制作机器人的身体。再在
上面进行打孔等工作,后就可以将机器人的其它部分安装上去。这样一个机器人
就制作好了。
下面我介绍一下机器人的基本组成部分:
(一)、机器人的大脑
它可以有很多叫法,可以叫做:可编程控制器、微控制器,微处理器,处理
器或者计算器等,不过这都不要紧,通常微处理器是指一块芯片,而其它的是一
整套控制器,包括微处理器和一些别的元件。任何一个机器人大脑就必须要有这
块芯片,不然就称不上机器人了。在选择微控制器的时候,主要要考虑:处理器
的速度,要实现的功能,ROM 和 RAM 的大小,I/O 端口类型和数量,编程语言以
及功耗等。
其主要类型有:单片机、PLC、工控机、PC 机等。
单有这些硬件是不够的,机器人的大脑还无法运行。只有在程序的控制下,
它才能按我们的要求去工作。可以说程序就是机器人的灵魂了。而程序是由编程
语言所编写的。
编程语言是一个控制器能够接受的语言类型,一般有 C 语言,汇编语言或者
basic 语言等,这些通常能被高级一点的控制器直接执行,因为在高级控制器里
面内置了编译器能够直接把一些高级语言翻译成机器码。微处理器将执行这些机
器码,并对机器人进行控制。
(二)、机器人的眼睛耳朵
传感器,是机器人的感觉器官,是机器人和现实世界之间的纽带,使机器人

4
能感知周围的环境情况。其主要有:光电传感器、红外传感器、力传感器、超声
波传感器、位置和姿态传感器等等。下面我将就几种常用传感器进行介绍:
1、光电传感器:光电传感器的原理是光电效应。其主要用途是颜色识别(机
器人就可以沿着地上的线条行进了)和光电编码等。
2、红外传感器:红外传感器是用来测量距离和感知周围情况的。因为发射
出去的红外信号在一定距离内遇到物体就会反射回来。通过发送红外线信号,并
接收反射回来的信号,机器人就可以感知前方或身体周围的情况,做出相应的调
整(如:倒退或绕行等)。
3、力传感器:力传感器是用来检测碰撞或者接触信号的,比如机械手的应
用,当你放一个东西到机械手的时候,机械手自动抓住它,它就需要力传感器检
测东西抓的紧不紧。典型的力传感器是微动开关和压敏传感器。微动开关其实就
是一个小开关,通过调节开关上的杠杆长短,能够调节触动开关的力的大小。用
来做碰撞检测这是最好不过了。但是这种传感器必须事先确定好力的阀值,也就
是说只能实现硬件控制(开还控制)。而压敏传感器是能根据受力大小,自动调
节输出电压或者电流,从而可以实现软件控制(闭环控制)。
4、超声波传感器:超声波传感器是从蝙蝠那里学来的,通过把发射出的信
号与接收到的信号进行对比,就可以测定周围是否有障碍物,及障碍物的距离,
也属于距离探测传感器,能提供交远的探测范围,而且还能提供在一个范围内的
探测而不是一条线的探测。
5、位置和姿态传感器:机器人在移动或者动作的时候必须时时刻刻知道自
己的姿态动作,否则就会产生控制中的一个开环问题,没有反馈,无法获知运动
是否正确。 位置传感器和姿态传感器就是用来解决这个问题的。常用的有光电
编码器,由于机器人的执行机构一般是电机驱动,通过计算电机转的圈数,可以
得出电机带动部件的大致位置,编码器就是这样一种传感器,它一般和电机轴或
者转动部件直接连接,电机或者转动部件转了多少圈或者角度能够通过编码器读
出,控制软件再根据读出数据进行位置估计计算。还有一种是陀螺仪,这是利用
陀螺原理制作的传感器,主要可以测得移动机器人的移动加速度,转过的角度等
信息。
(三)、机器人的腿——驱动器与驱动轮
驱动器就是驱动机器人的动的部件。最常用的是电机了。当然还有液压,气
动等别的驱动方式。一个机器人最主要的控制量就是控制机器人的移动,无论是
自身的移动还是手臂等关节的移动,所以机器人驱动器中最根本和本质的问题就
是控制电机,控制电机转的圈数,就可以控制机器人移动的距离和方向,机械手
臂的弯曲的程度或者移动的距离等。所以,第一个要解决的问题就是如何让电机
能根据自己的意图转动。一般来说,有专门的控制卡和控制芯片来进行控制的。
有了这些控制卡和芯片,我们所要做的就是把微控制器和这些连接起来,然后就
可以用程序来控制电机了。第二个问题是控制电机的速度,在机器人上的实际表
现就是机器人或者手臂的实际运动速度了,机器人走的快慢全靠电机的转速,这
样,我们就要求控制卡对电机有速度控制。电机目前常用的有两种,步进电机和
直流电机。下面我将就这两种电机进行介绍:

5
1、直流电机:这是最最普通的电机了。直流电机最大的问题是你没法精确
控制电机转的圈数,也就前面所说的位置控制。你必须加上一个编码盘,来进行
反馈,来获得实际转的圈数。但是直流电机的速度控制相对就比较简单,用一种
叫 PWM(脉宽调速)的调速方法可以很轻松的调节电机速度。现在也有很多控制
芯片带调速功能的。选购时要考虑的参数是电机的输出力矩,电机的功率,电机
的最高转速。
2、步进电机:看名字就知道了,它是一步一步前进的。也就是说,它可以
一个角度一个角度旋转,不象直流电机,你可以很轻松的调节步进电机的转角位
置,如果你发一个转 10 圈的指令,步进电机就不会转 11 圈,但是如果是直流电
机,由于惯性作用,它可能转 11 圈半。步进电机的调速是通过控制电机的频率
来获得的。一般控制信号频率越高,电机转的越快,频率越低,转的越慢。选购
时要考虑的参数是电机的输出力矩,电机的功率,每个脉冲电机的最小转角。
还有就是关于输出的动力,要说明一下:一般情况下,电机都没法直接带动
轮子或者手臂,因为速度过高力矩不够大,所以我们需要加上一个减速箱来增加
电机的输出力矩,但是代价是电机速度的减小,比如一个 1:250 的齿轮箱,会
让你电机的输出力矩增大 250 倍,但是速度只有原来的 1/250 了。首先计算出机
器人所需要的速度与力矩大小,然后根据速度与力矩去选择电机与减速器。
(四)、机器人的手臂——机械传动专制
机械传动专制就是,由电机驱动的一些杆件和机构(如:凸轮机构、螺杆机
构等),用以实现机械手臂的上升、下降、伸缩、弯曲等动作。通常运用的机构
有四杆机构、凸轮机构、螺杆机构、摇臂等。
(五)、机器人的心脏——电池
电池为机器人的控制系统与驱动系统提供能源供应。主要有:电瓶及可充电
电池、电池。
前面介绍了机器人的一些基本知识,但这是远远不够的。机器人学科,是在
多学科基础上发展起来的综合性技术。机器人技术涉及机械、电子、计算机、语
言学和人工智能等许多学科。现在机器人已经应用在人类社会生活的各个领域,
发挥着越来越重要的影响。
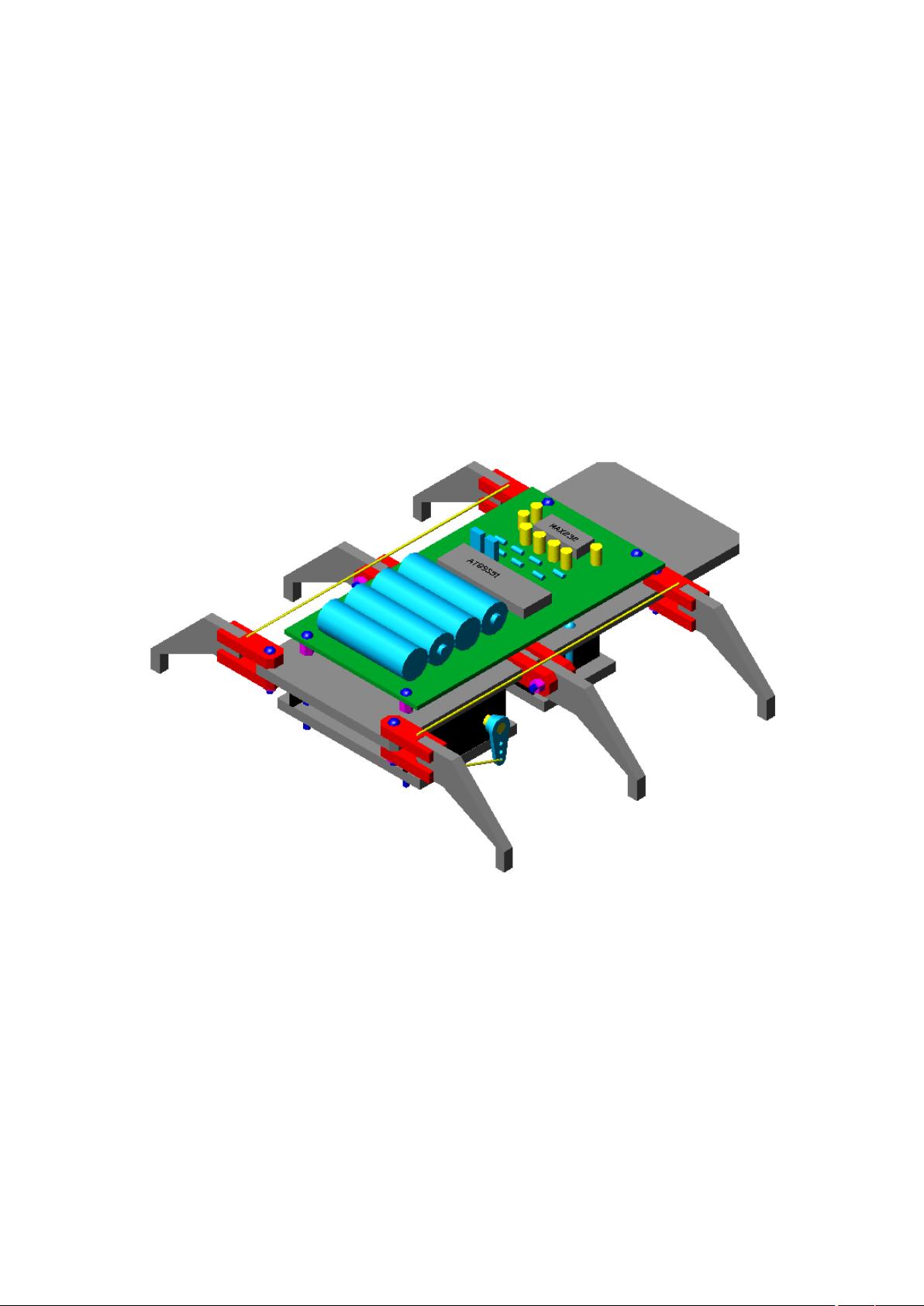
我利用暑假的时间设计了一个六足爬虫机器人,用日立(HITACHI)的录
像机遥控器来对它进行控制。基本原理是:遥控器发出红外学号,机器人通过红
外接收器接收倒红外信号后,对信号进行解码,并以存储的代码进行比较,确定
指令的含义,后可以实现前进、后退、左转、右转及发声等功能。控制系统我使
用的是 AT89S51 单片机,编程语言使用的是汇编语言,动力系统使用的是微型
伺服马达,能源系统使用的是 9V 电池。下面我将就具体设计进行介绍。













