

IEEE TRANSACTIONS ON ROBOTICS, VOL. 28, NO. 1, FEBRUARY 2012 61
Visual-Inertial-Aided Navigation for High-Dynamic
Motion in Built Environments Without
Initial Conditions
Todd Lupton and Salah Sukkarieh
Abstract—In this paper, we present a novel method to fuse ob-
servations from an inertial measurement unit (IMU) and visual
sensors, such that initial conditions of the inertial integration,
including gravity estimation, can be recovered quickly and in a
linear manner, thus removing any need for special initialization
procedures. The algorithm is implemented using a graphical simul-
taneous localization and mapping like approach that guarantees
constant time output. This paper discusses the technical aspects
of the work, including observability and the ability for the system
to estimate scale in real time. Results are presented of the system,
estimating the platforms position, velocity, and attitude, as well as
gravity vector and sensor alignment and calibration on-line in a
built environment. This paper discusses the system setup, describ-
ing the real-time integration of the IMU data with either stereo or
monocular vision data. We focus on human motion for the pur-
poses of emulating high-dynamic motion, as well as to provide a
localization system for future human–robot interaction.
Index Terms—Field robots, localization, search-and-rescue
robots, sensor fusion.
I. INTRODUCTION
T
HE motivation of this paper was inspired by the need to
develop a human-mounted localization system for first re-
sponse units, such as fire fighters, counter-terrorism groups, and
search-and-rescue operators. The system had to keep track of
the location of the operator in an unknown building in real
time. The system could not use any purpose built localiza-
tion infrastructure and had to provide information that could
be shared with the future incorporation of robotic systems in the
mission.
A human-mounted localization system for first responders
operating in built environments poses a number of difficulties.
There is the lack of (or poor) global positioning system (GPS)
signals, unreliable magnetic readings, high-dynamic motion,
Manuscript received September 7, 2010; revised April 28, 2011; accepted
September 21, 2011. Date of publication November 29, 2011; date of current
version February 9, 2012. This paper was recommended for publication by
Associate Editor J. Neira and Editor D. Fox upon evaluation of the reviewers’
comments. This work was supported in part by the Australian Research Council
(ARC) Centre of Excellence programme, funded by the ARC and the New South
Wales State Government, and by ARC Discovery under Grant DP0665439.
T. Lupton was with The University of Sydney, Sydney, N.S.W. 2006,
Australia. He is now with Silverbrook Research, Balmain, N.S.W. 2041,
Australia (e-mail: tlup8791@uni.sydney.edu.au).
S. Sukkarieh is with The University of Sydney, Sydney, N.S.W. 2006,
Australia (e-mail: salah@acfr.usyd.edu.au).
Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TRO.2011.2170332
and the lack of any internal localization infrastructure. A local-
ization system would, thus, need to use whatever features were
available in the environment, but the closeness of objects in the
buildings, as well as the presence of walls, means that landmark
features may only be observable for short periods of time. The
system must also be able to quickly initialize and handle periods
when few or no external landmarks are observed.
Cameras can work with landmarks of opportunity that al-
ready exist in the environment; therefore, no external infras-
tructure is required. Indoor Simultaneous Localization and Map-
ping (SLAM) using a single camera has been developed in the
past [4]; however, this implementation had to operate at a high
frame rate, i.e., up to 200 Hz [9], and even then, only slow dy-
namics and certain restricted motions could be used. In addition,
as a single camera only provides bearing observations, special-
ized landmark initialization techniques are required as range is
not immediately observable, and the scale of the environment
and, therefore, the motions cannot be determined.
The use of a stereo camera pair for SLAM [17], [18] or visual
odometry [11] gives very promising results for this kind of
application. In addition to providing more constrained motion
estimates, the true map scale can be observed and scale drift over
the trajectory is eliminated. The close proximity to landmarks
and visually rich environments contribute greatly to its success.
The main shortcoming of a system that relies solely on visual
observations is that it will fail when sufficient visual landmarks
are not observable, even if for just a short period of time. This
could easily be the case for human-mounted systems that are
considered in this paper. For example, loss of distinct visual
features can occur in dark areas of buildings, due to motion
blur, if smoke is present, or if the cameras are very close to
blank walls such as in narrow corridors or staircases.
The use of an inertial measurement unit (IMU) could help
in these momentary periods where visual observations may not
be available [19]. Even a low-cost IMU can observe the high
dynamics of such a system and can constrain the estimated lo-
cation for short periods once properly initialized. The difficulty
in using an IMU in these applications is one of obtaining proper
initialization.
In this paper, the development and analysis of a novel system
to process and fuse inertial observations with observations from
other body frame sensors, such as cameras, is presented. This
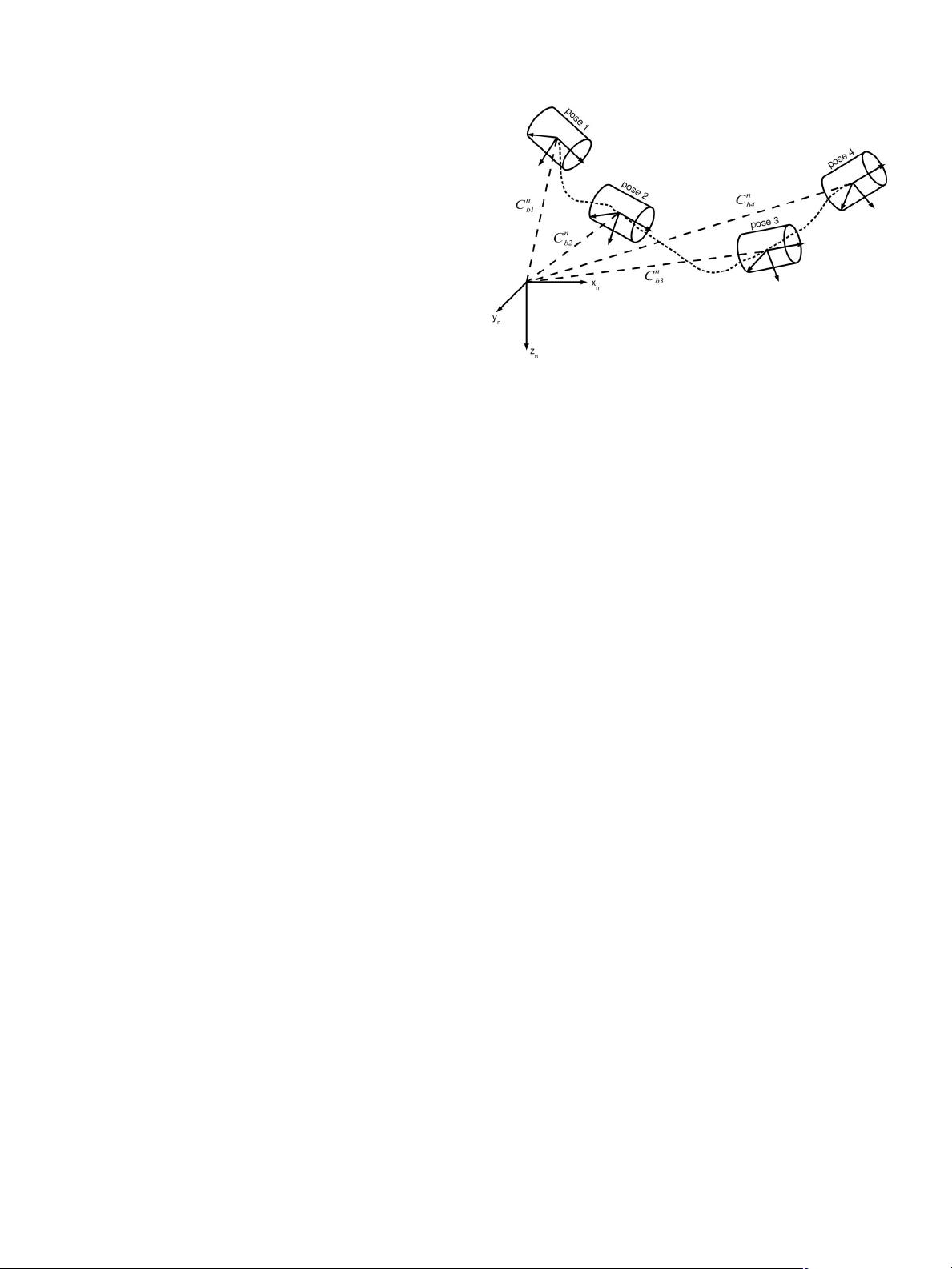
system is inspired by the idea that inertial observations can
be integrated in an arbitrary frame between poses to form a
single pseudo-observation, as presented in [16]. This core idea is
expanded in this paper with integration into a graphical filter that
1552-3098/$26.00 © 2011 IEEE
剩余15页未读,继续阅读
资源评论













