Keyframe-Based Visual-Inertial Odometry Using Nonlinear Optimiza...
需积分: 0 152 浏览量
2017-11-06
11:12:37
上传
评论
收藏 5.29MB PDF 举报
1
Keyframe-Based Visual-Inertial Odometry Using
Nonlinear Optimization
Stefan Leutenegger
∗
, Simon Lynen
∗
, Michael Bosse
∗
, Roland Siegwart
∗
, and Paul Furgale
∗
∗
Autonomous Systems Lab (ASL), ETH Zurich, Switzerland
Abstract
Combining visual and inertial measurements has become popular in mobile robotics, since the two sensing modalities
offer complementary characteristics that make them the ideal choice for accurate Visual-Inertial Odometry or Simultaneous
Localization and Mapping (SLAM). While historically the problem has been addressed with filtering, advancements in
visual estimation suggest that non-linear optimization offers superior accuracy, while still tractable in complexity thanks
to the sparsity of the underlying problem. Taking inspiration from these findings, we formulate a rigorously probabilistic
cost function that combines reprojection errors of landmarks and inertial terms. The problem is kept tractable and thus
ensuring real-time operation by limiting the optimization to a bounded window of keyframes through marginalization.
Keyframes may be spaced in time by arbitrary intervals, while still related by linearized inertial terms. We present evaluation
results on complementary datasets recorded with our custom-built stereo visual-inertial hardware that accurately synchronizes
accelerometer and gyroscope measurements with imagery. A comparison of both a stereo and monocular version of our
algorithm with and without online extrinsics estimation is shown with respect to ground truth. Furthermore, we compare the
performance to an implementation of a state-of-the-art stochasic cloning sliding-window filter. This competititve reference
implementation performs tightly-coupled filtering-based visual-inertial odometry. While our approach declaredly demands
more computation, we show its superior performance in terms of accuracy.
I. INTRODUCTION
Visual and inertial measurements offer complementary properties which make them particularly suitable for fusion,
in order to address robust and accurate localization and mapping, a primary need for any mobile robotic system. The
rich representation of structure projected into an image, together with the accurate short-term estimates by gyroscopes
and accelerometers contained in an IMU have been acknowledged to complement each other, with promising use-cases
in airborne (Mourikis and Roumeliotis, 2007; Weiss et al., 2012) and automotive (Li and Mourikis, 2012a) navigation.
Moreover, with the availability of these sensors in most smart phones, there is great interest and research activity in effective
solutions to visual-inertial SLAM (Li et al., 2013).
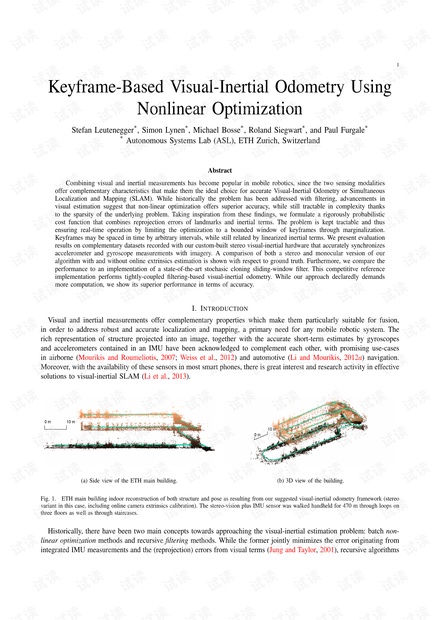
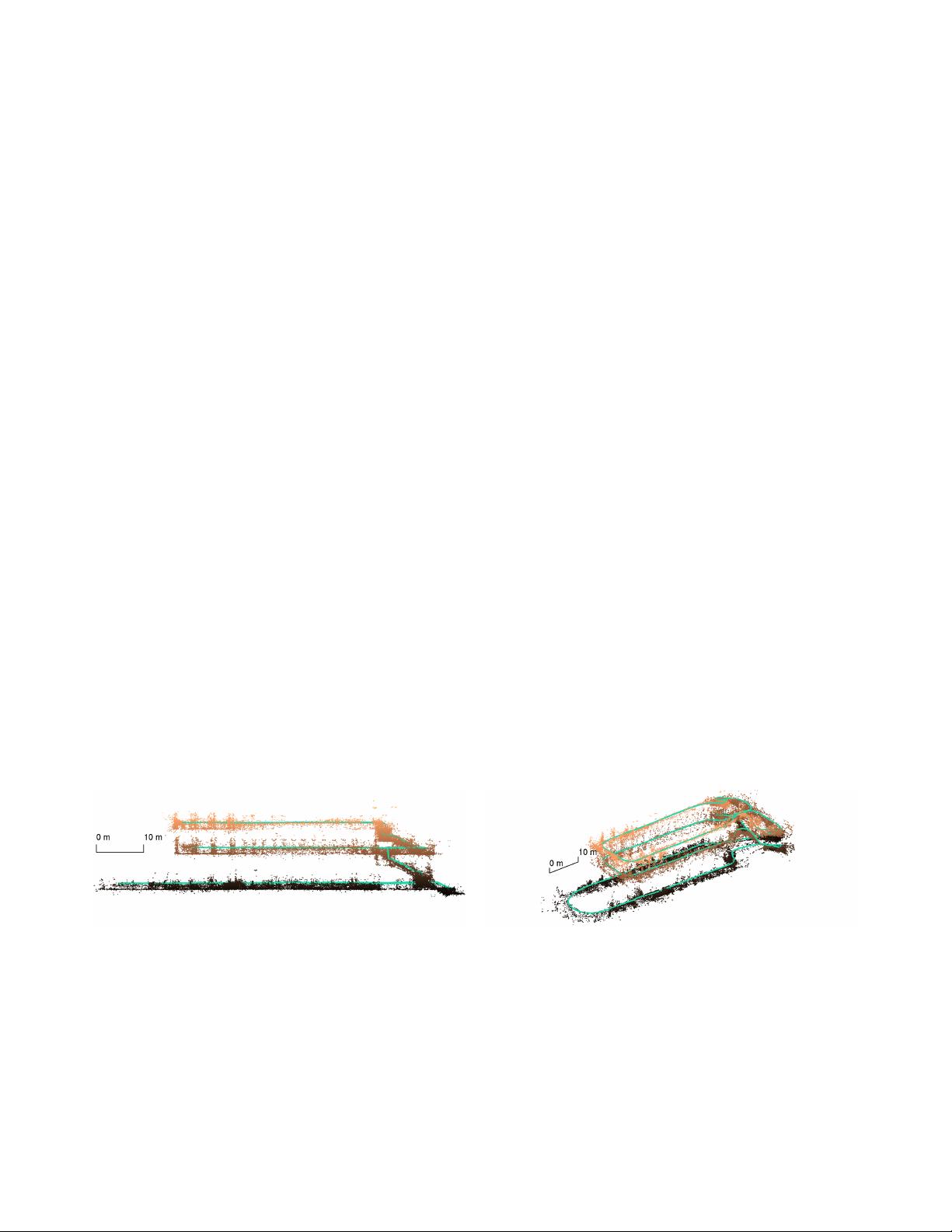
(a) Side view of the ETH main building. (b) 3D view of the building.
Fig. 1. ETH main building indoor reconstruction of both structure and pose as resulting from our suggested visual-inertial odometry framework (stereo
variant in this case, including online camera extrinsics calibration). The stereo-vision plus IMU sensor was walked handheld for 470 m through loops on
three floors as well as through staircases.
Historically, there have been two main concepts towards approaching the visual-inertial estimation problem: batch non-
linear optimization methods and recursive filtering methods. While the former jointly minimizes the error originating from
integrated IMU measurements and the (reprojection) errors from visual terms (Jung and Taylor, 2001), recursive algorithms


剩余25页未读,继续阅读
资源评论













