
二并联杆数控螺旋面钻头尖刃磨机的机构仿真
一、仿真原理
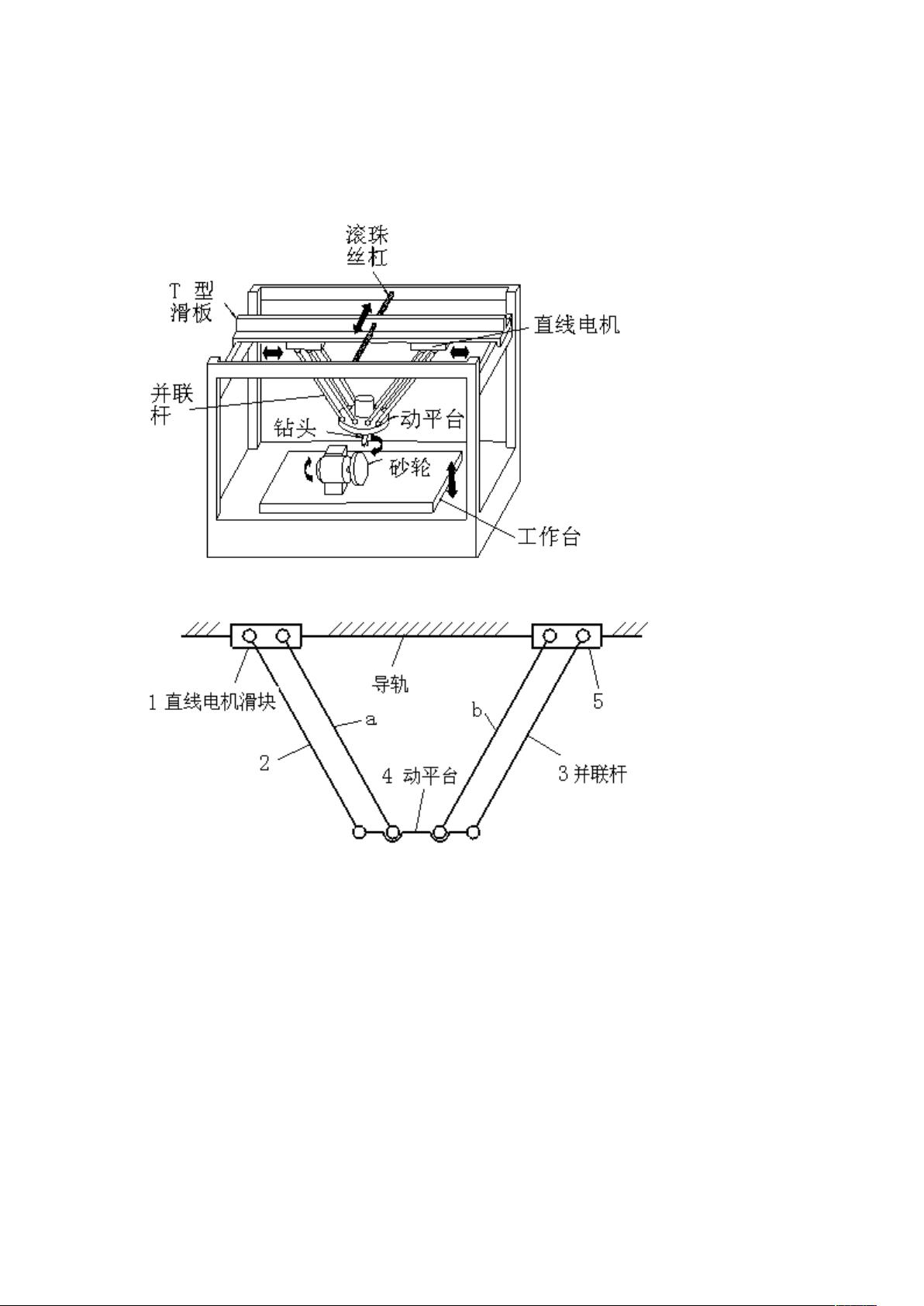
图 1 二并联杆数控螺旋面钻头尖刃磨机床示意图
图 2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图
重要假设条件:
1、 二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a 和 3,b)保证动平台 4
只在空间中做水平运动,而没有翻转运动。每一组并联杆是由空间相互平行的 4 根杆
件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图 2。构件 a,b 是保
证动平台 4 只做水平运动的辅助平行杆,所以可以假设将机构中杆件 a,b 省略,而动
平台 4 只做水平移动,没有翻转运动,也就是 4 相对于地面的夹角 θ4 恒等于 0。
2、 直线电机的次子有两个(1 和 5)但是在加工过程中并不是两者同时运动,所以假设 5
与导轨固联。
3、 假设机床在工作过程中动平台 4 只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图 3。

剩余9页未读,继续阅读
资源评论


insitite
- 粉丝: 0
- 资源: 2









最新资源
- 滑坡区受损输电铁塔承载力分析与加固研究(2).docx
- 基于S-变换理论的变压器励磁涌流鉴别的研究开题报告.docx
- 基于超声振动与微量润滑耦合...制的钛合金铣削表面质量研究_戎杰.pdf
- 基于改进TD3算法的无人机轨迹规划_牟文心(1).pdf
- 基于关键断面分析的电网安全校核方法研究.docx
- 基于二维FDTD算法的甚低频电波传播特性分析_李毅.pdf
- 基于改进灰狼优化算法的储能双向变流器控制策略研究_冯良瑞(1).pdf
- 基于深度学习的花卉识别系统的设计与实现任务书.docx
- 基于模糊控制策略的高速列车防滑控制研究_苏超.pdf
- 基于优化EKF的PMSM无位置传感器矢量控制研究_崔鹏龙.pdf
- 履带车辆路径规划与轨迹跟踪控制方法研究_周琳.pdf
- Simulink光伏MPPT模型:遮荫条件下扰动观察法与粒子群优化结果对比,Simulink光伏MPPT模型的扰动观察法与粒子群算法对比研究 图解:模型构建、I-U与P-U曲线分析以及算法结果对比
- 灵活性资源聚合参考模型与量化指标体系.pdf
- 汽车AEB系统行人避撞策略的研究-中期报告(1).docx
- 区域能源互联网“站-网”布局优化研究.pdf
- 面向无线自组网的防窃听和抗干扰通信研究.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


