MonoSLAM: Real-Time Single Camera SLAM
Andrew J. Davison, Ian D. Reid, Member, IEEE, Nicholas D. Molton, and
Olivier Stasse, Member, IEEE
Abstract—We present a real-time algorithm which can recover the 3D trajectory of a monocular camera, moving rapidly through a
previously unknown scene. Our system, which we dub MonoSLAM, is the first successful application of the SLAM methodology from
mobile robotics to the “pure vision” domain of a single uncontrolled camera, achieving real time but drift-free performance inaccessible
to Structure from Motion approaches. The core of the approach is the online creation of a sparse but persistent map of natural
landmarks within a probabilistic framework. Our key novel contributions include an active approach to mapping and measurement, the
use of a general motion model for smooth camera movement, and solutions for monocular feature initialization and feature orientation
estimation. Together, these add up to an extremely efficient and robust algorithm which runs at 30 Hz with standard PC and camera
hardware. This work extends the range of robotic systems in which SLAM can be usefully applied, but also opens up new areas. We
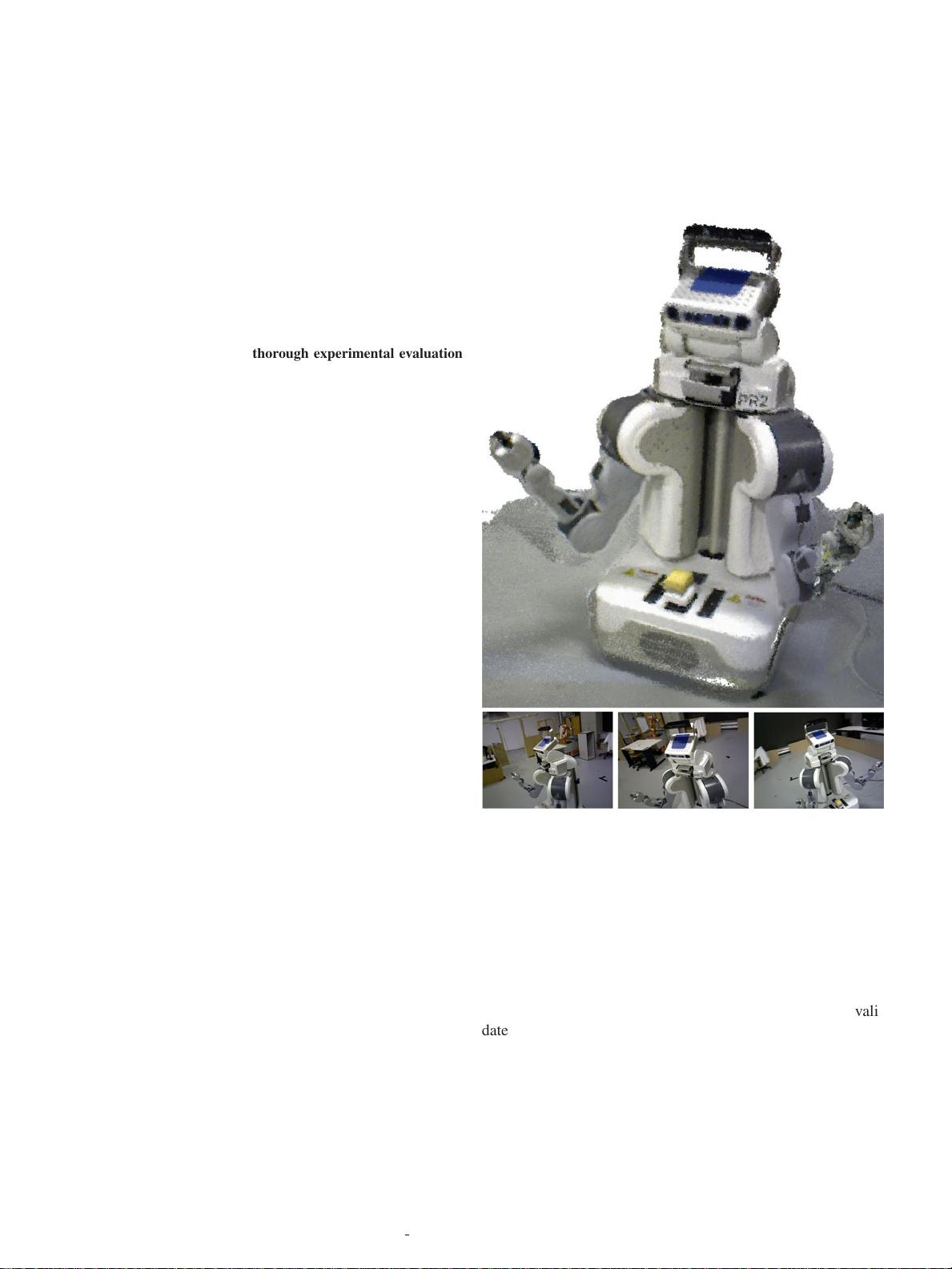
present applications of MonoSLAM to real-time 3D localization and mapping for a high-performance full-size humanoid robot and live
augmented reality with a hand-held camera.
Index Terms—Autonomous vehicles, 3D/stereo scene analysis, tracking.
Ç
1INTRODUCTION
T
HE last 10 years have seen significant progress in
autonomous robot navigation and, specifically, Simulta-
neous Localization and Mapping (SLAM) has become well-
defined in the robotics community as the question of a moving
sensor platform constructing a representation of its environ-
ment on the fly while concurrently estimating its ego-motion.
SLAM is today is routinely achieved in experimental robot
systems using modern methods of sequential Bayesian
inference and SLAM algorithms are now starting to cross
over into practical systems. Interestingly, however, an d
despite the large computer vision research community, until
very recently the use of cameras has not been at the center of
progress in robot SLAM, with much more attention given to
other sensors such as laser range-finders and sonar.
This may seem surprising since for many reasons vision is
an attractive choice of SLAM sensor: cameras are compact,
accurate , noninvasive , and well -understood—and today
cheap and ubiquitous. Vision, of course, also has great
intuitive appeal as the sense humans and animals primarily
use to navigate. However, cameras capture the world’s
geometry only indirectly through photometric effects and it
was thought too difficult to turn the sparse sets of features
popping out of an image into rel iable long-term maps
generated in real-time, particularly since the data rates
coming from a camera are so much higher than those from
other sensors.
Instead, vision researchers concentrated on reconstruc-
tion problems from small image sets, developing the field
known as Structure from Motion (SFM). SFM algorithms
have been extended to work on longer image sequences,
(e.g., [1], [2], [3]), but these systems are fundamentally
offline in nature, analyzing a complete image sequence to
produce a reconstruction of the camera trajectory and scene
structure observed. To obtain globally consistent estimates
over a sequence, local motion estimates from frame-to-
frame feature matching are refined in a global optimization
moving backward and forward through the whole sequence
(called bundle adjustment). These methods are perfectly
suited to the automatic analysis of short image sequences
obtained from arbitrary sources—movie shots, consumer
video, or even decades-old archive footage—but do not scale
to consistent localization over arbitrarily long sequences in
real time.
Our work is highly focused on high frame-rate real-time
performance (typically 30Hz) as a requirement. In applica-
tions, real-time algorithms are necessary only if they are to
be used as part of a loop involving other components in the
dynamic world—a robot that must control its next motion
step, a human that needs visual feedback on his actions or
another computational process which is waiting for input.
In these cases, the most immediately useful information to
be obtained from a moving camera in real time is where it is,
rather than a fully detailed “final result” map of a scene
ready for display. Although localization and mapping are
intricately coupled problems and it has been proven in
SLAM research that solving either requires solving both, in
this work we focus on localization as the main output of
interest. A map is certainly built, but it is a sparse map of
landmarks optimized toward enabling localization.
Further, real-time camera tracking scenarios will often
involve extended and looping motions within a restricted
environment (as a humanoid performs a task, a domestic
robot cleans a home, or room is viewed from different angles
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 29, NO. 6, JUNE 2007 1
. A.J. Davison is with the Department of Computing, Imperial College, 180
Queen’s Gate, SW7 2AZ, London, UK. E-mail: ajd@doc.ic.ac.uk.
. I.D. Reid is with the Robotics Research Group, Department of Engineering
Science, University of Oxford, OX1 3PJ, UK. E-mail: ian@robots.ox.ac.uk.
. N.D. Molton is with Imagineer Systems Ltd., The Surrey Technology
Centre, 40 Occam Road, The Surrey Research Park, Guildford GU2 7YG,
UK. E-mail: ndm@imagineersystems.com.
. O. Stasse is with the Joint Japanese-French Robotics Laboratory (JRL),
CNRS/AIST, AIST Central 2, 1-1-1 Umezono, Tsukuba, Ibaraki, 305-
8568, Japan. E-mail: olivier.stasse@aist.go.jp.
Manuscript received 13 Dec. 2005; revised 29 June 2006; accepted 6 Sept.
2006; published online 18 Jan. 2007.
Recommended for acceptance by C. Taylor.
For information on obtaining reprints of this article, please send e-mail to:
tpami@computer.org, and reference IEEECS Log Number TPAMI-0705-1205.
Digital Object Identifier no. 10.1109/TPAMI.2007.1049.
0162-8828/07/$25.00 ß 2007 IEEE Published by the IEEE Computer Society