二自由度机器人的位置控制.pdf
版权申诉
32 浏览量
2023-05-07
08:50:45
上传
评论
收藏 264KB PDF 举报

实验 二自由度机器人的位置控制
一、实验目的
1. 运用 Matlab 语言、Simulink 及 Robot 工具箱,搭建二自由度机器人的几何模
型、动力学模型,
2. 构建控制器的模型,通过调整控制器参数,对二自由度机器人的位姿进行控
制,并达到较好控制效果。
二、工具软件
1.Matlab 软件
2.Simulink 动态仿真环境
3.robot 工具箱
模型可以和实际中一样,有自己的质量、质心、长度以及转动惯量等,但需要注意的
是它所描述的模型是理想的模型,即质量均匀。这个工具箱还支持 Simulink 的功能,因此,
可以根据需要建立流程图,这样就可以使仿真比较明了。
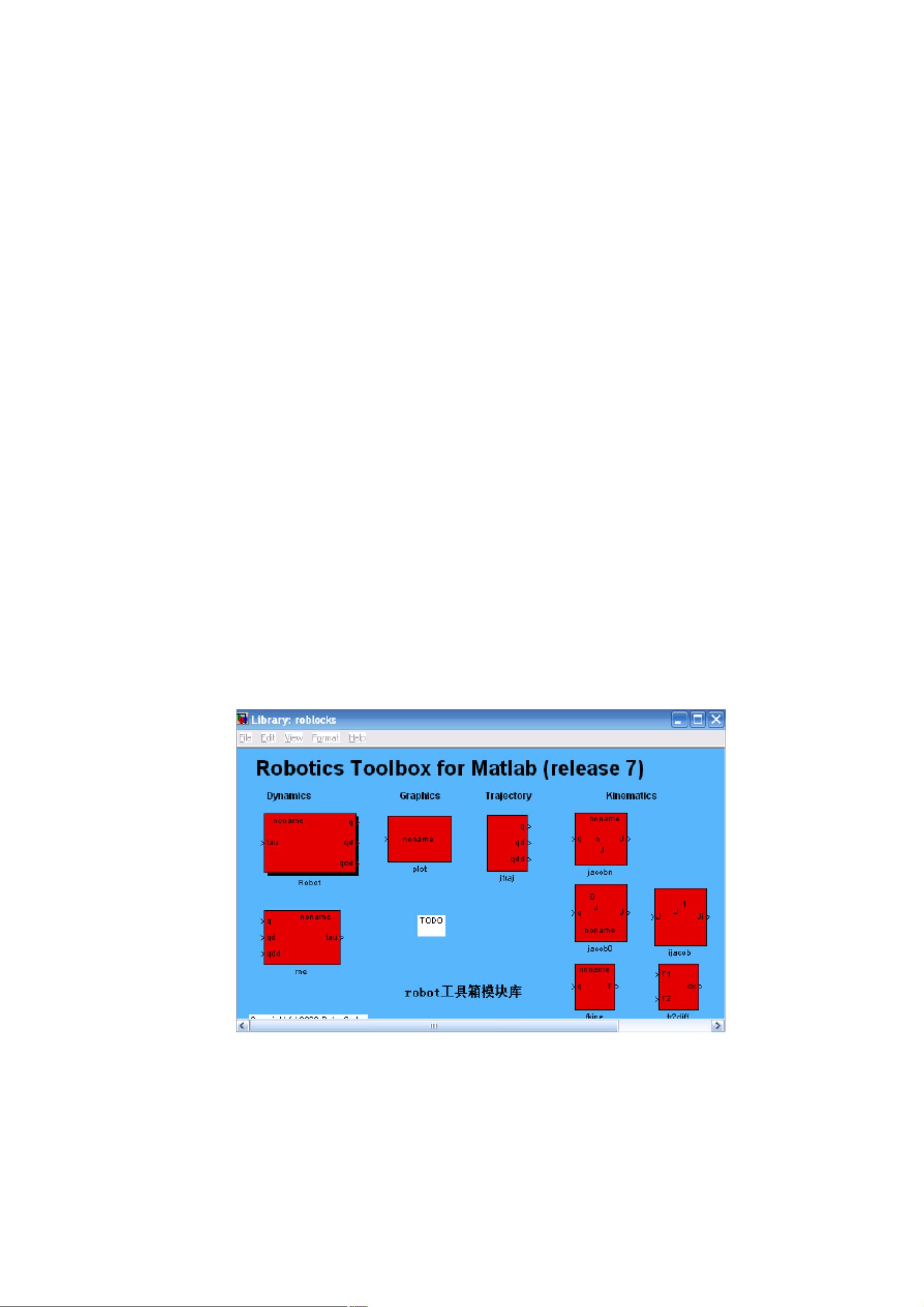
把 robot 工具箱拷贝到 MATLAB/toolbox 文件夹后,打开 matalb 软件,点击 path,
在打开的对话框中选 add with subfolders ,选中添加 MATLAB/toolbox/robot,保存。这
是在 matlab 命令窗口键入 roblocks 就会弹出 robot 工具箱中的模块(如下图)。
三、实验原理
在本次仿真实验中,主要任务是实现对二自由度机器人的控制,那么首先就
要创建二自由度机器人对象,
1 / 7
资源评论













