
四相步进电机原理图
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬
件设计。
1. 步进电机的工作原理
该步进电机为一四相步进电机,采用单极性直流电源供电。只
要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进
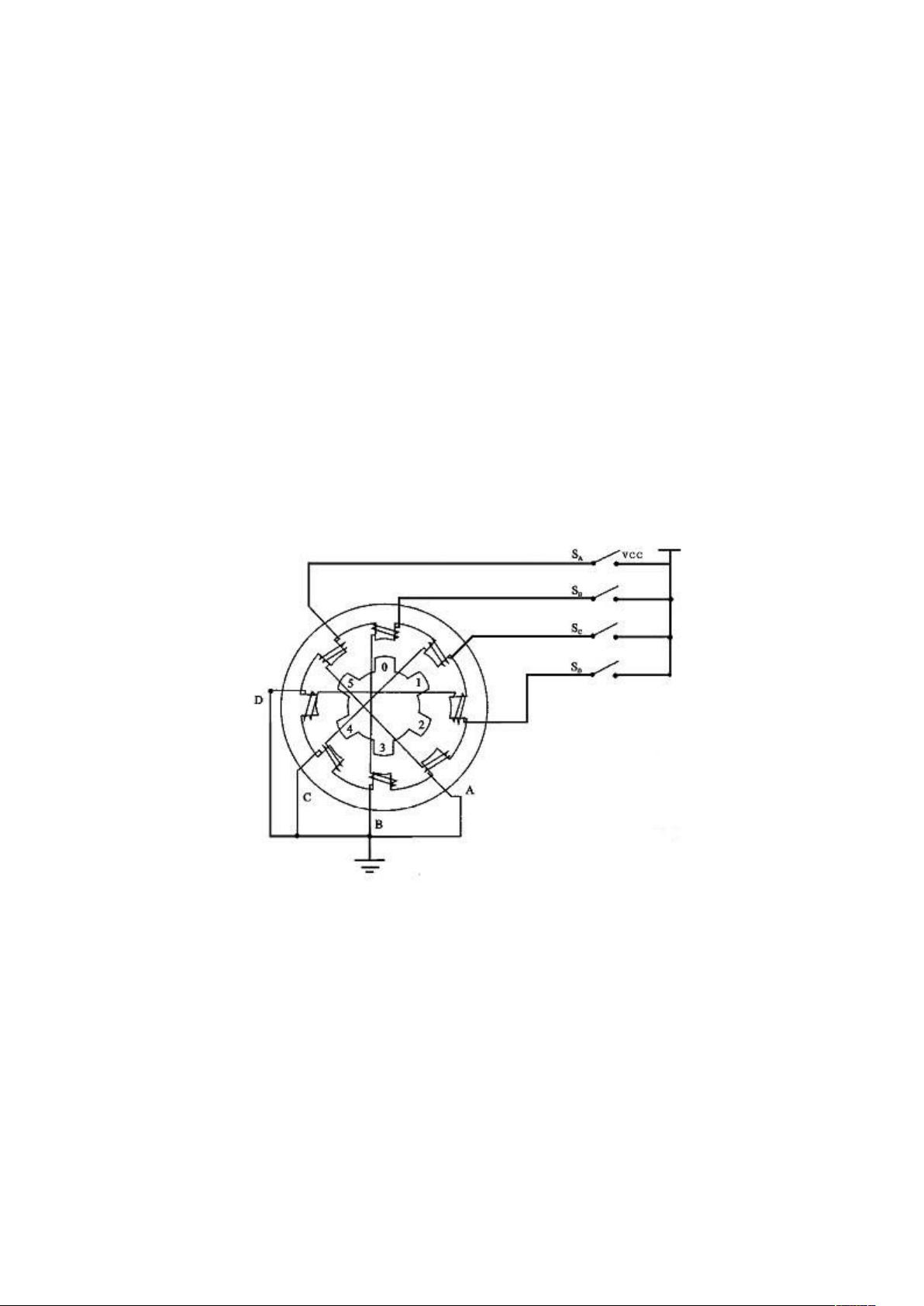
转动。图 1 是该四相反应式步进电机工作原理示意图。
图 1 四相步进电机步进示意图
开始时,开关 SB 接通电源,SA、SC、SD 断开,B 相磁极和
转子 0、3 号齿对齐,同时,转子的 1、4 号齿就和 C、D 相
绕组磁极产生错齿,2、5 号齿就和 D、A 相绕组磁极产生错齿。

剩余11页未读,继续阅读
资源评论


hdlitao
- 粉丝: 2
- 资源: 9









最新资源
- java项目,毕业设计-家具商城系统
- sparse-occ-cpu.onnx
- c2532703d1b4e83f570f28ff6cf94aef_语法.pdf
- C# 将不限数量的Excel表格进行合并,支持多文件多表合并.zip
- java项目,毕业设计-体育场馆运营
- 阿里云联合中国信通院安全所发布-大模型安全研究报告2024
- 低空经济政策与产业生态研究报告(2024年)
- 基于微信小程序的手机商城的设计与实现ssm.zip
- 基于springboot汽车维修管理系统微信小程序springboot.zip
- 非常好用 的一款,网卡流量监控工具,可长时间 监控,有图标展示流量趋势,要记录一段时间 内的平均 流量,可单独记录每个网卡的流量, 绿色好用, 无功能 限制
- 基于微信小程序的医院挂号预约系统ssm.zip
- 基于机器学习的商品评论分析系统源代码+文档说明+GUI界面(高分项目)
- 基于微信小程序的校园二手交易平台ssm.zip
- 基于微信小程序的校园综合服务平台ssm.zip
- 基于微信小程序高校订餐系统的设计与开发ssm.zip
- 线性回归实现股票预测源代码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


