
四相步进电机原理图及其驱动器的软、硬件设计四相步进电机原理图及其驱动器的软、硬件设计
本文详解了四相步进电机原理图及其驱动器的软、硬件设计。
1、步进电机的工作原理
该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步
进转动。
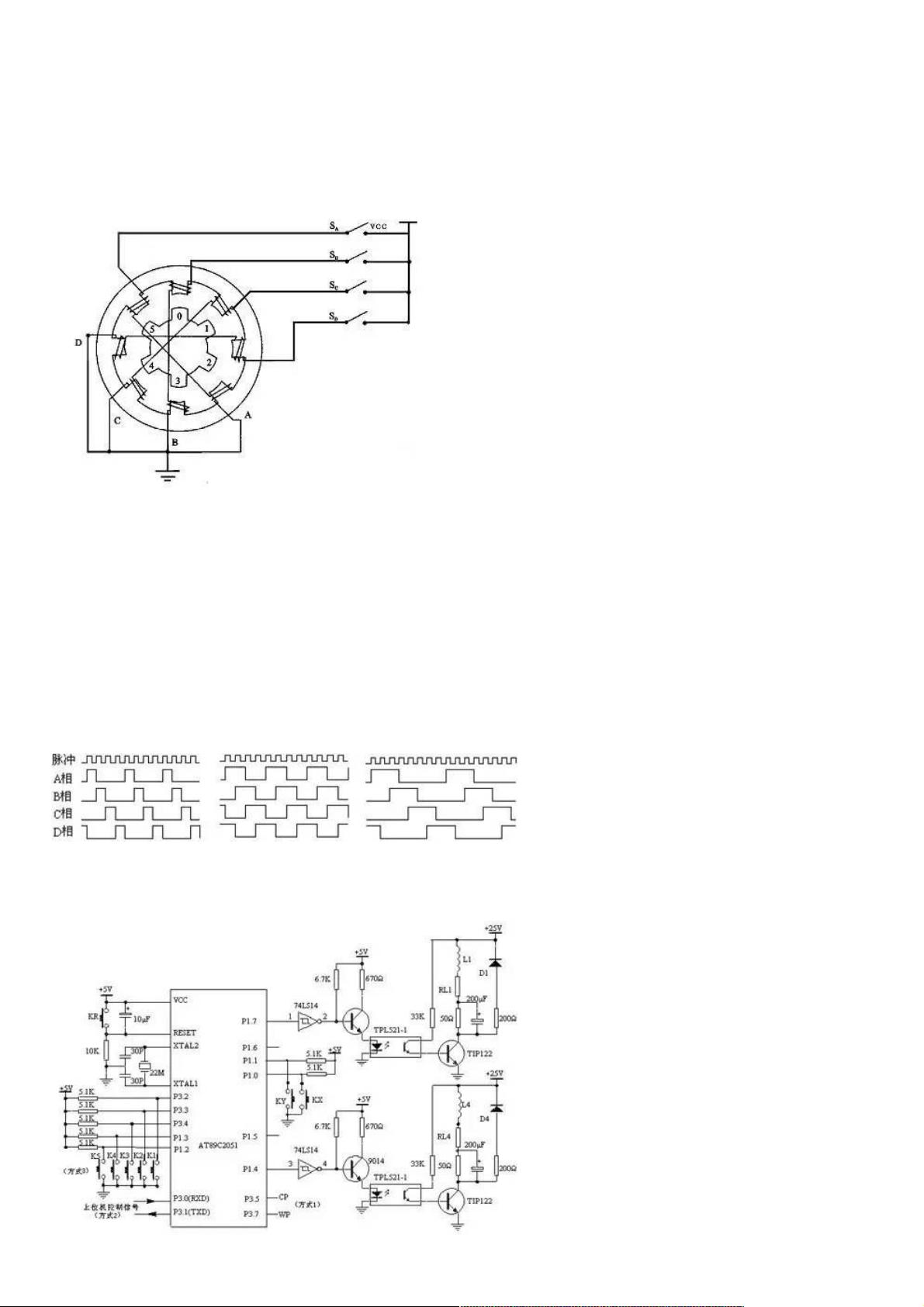
图1 四相步进电机步进示意图
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相 绕组磁
极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和
C相绕组的磁极对齐。而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。依次类推,A、B、C、
D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的
转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控
制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍 b. 双四拍 c八拍
图2.步进电机工作时序波形图
2、基于AT89C2051的步进电机驱动器系统电路原理
资源评论

 滕扬Lance2023-07-25这个文件很详细地介绍了四相步进电机的原理图和驱动器的软、硬件设计,对于学习和理解步进电机的工作原理来说非常有帮助。
滕扬Lance2023-07-25这个文件很详细地介绍了四相步进电机的原理图和驱动器的软、硬件设计,对于学习和理解步进电机的工作原理来说非常有帮助。 XU美伢2023-07-25不仅仅是理论,文件中还包含了一些实际的应用案例,让读者更加直观地了解了步进电机在实际项目中的应用场景。
XU美伢2023-07-25不仅仅是理论,文件中还包含了一些实际的应用案例,让读者更加直观地了解了步进电机在实际项目中的应用场景。 KerstinTongxi2023-07-25对于想要深入研究和应用步进电机的人来说,这个文件提供了一个很好的参考和指导,值得一读。
KerstinTongxi2023-07-25对于想要深入研究和应用步进电机的人来说,这个文件提供了一个很好的参考和指导,值得一读。 以墨健康道2023-07-25作者在图文结合的展示方式上做得很好,使得一目了然地了解了步进电机的结构和驱动方式。
以墨健康道2023-07-25作者在图文结合的展示方式上做得很好,使得一目了然地了解了步进电机的结构和驱动方式。 坑货两只2023-07-25文件中的软、硬件设计方案给出了具体的示意图和详细的说明,非常实用和可行。
坑货两只2023-07-25文件中的软、硬件设计方案给出了具体的示意图和详细的说明,非常实用和可行。












