
174
IEEE
TRANSACTIONS ON
ROBOTICS
AND
AUTOMATION,
VOL.
9,
NO.
2,
APRIL
1993
A
Linear Solution to the Kinematic Parameter
Identification
of
Robot Manipulators
Hanqi Zhuang,
Member, IEEE,
and Zvi
S.
Roth,
Senior Member, IEEE
Abstruct-
An important step in a model-based robot calibra-
tion process is the identification of the manipulator’s unknown
kinematic model parameters from end-effector pose measure-
ments and robot joint position readings at known measurement
configurations. A linear solution method for the unknown kine-
matic parameters directly from the forward kinematic model is
presented. The proposed method requires the use of neither a
nominal model nor a linearized error model of the robot. Such
a solution is possible for two reasons:
1)
the use of a special
robot kinematic modeling convention known as the CPC model,
in which the independent CPC link parameters appear linearly in
the system of equations to be solved; and
2)
the use of a particular
sequence of robot pose measurements. The CPC orientation
parameters of the revolute joints are first determined recursively
under the condition that the pose measurements of the robot
are taken while releasing each revolute joint one at a time and
successively. The remaining CPC parameters are then computed
in terms of the orientation parameters obtained earlier.
For
explicit solution formulas of an
TI
degree-of-freedom manipulator,
end-effector pose measurements from
n
+
1
configurations need
to be acquired. Additional pose measurements can be handled
by least squares techniques. Some practical issues related to
kinematic parameter identification with the proposed approach
are addressed through simulation studies.
I. INTRODUCTION
INEMATIC IDENTIFICATION is the process by which
K
all kinematic model parameters of a robot manipulator
are identified given a set of end-effector pose measurements
and the corresponding joint position measurements. This is an
important phase in a model-based robot calibration
[
1
I-[3].
Determining kinematic parameters directly from the kine-
matic model given the measurement data, although appealing
both theoretically and practically, is difficult since pose com-
ponents of the robot end-effector are in general nonlinear func-
tions of the robot link parameters. Linearization techniques
have been widely used to construct kinematic error models
relating robot pose errors to its kinematic parameter errors,
based on which kinematic parameter deviations are found
by iteratively solving linear least squares problems
[3]-[
121.
This type of technique often allows effective implementa-
tion and requires a relatively small number of measurement
configurations. A fairly extensive off-line simulation study
is often required to determine, for each individual robot,
the number of and the optimal choice of measurement con-
figurations to ensure a reasonably small condition number
for the “Identification Jacobian”
[
1314 151. Kinematic error
parameters often lack a simple geometric interpretation. For
example, as some of the robot pose error sources correspond
to joint axis misalignment, an actual joint rotation
8i
and
a nominal joint rotation
are,
in general, rotations with
respect to different lines in space. An error parameter
6Bi
is
therefore not the joint position encoder offset but an element
in a set of abstract mathematical entities which account for
robot pose errors in the least squares sense. For the linearized
error model to be valid, the nominal model of the robot has
to be sufficiently close to the actual model. Although certain
nonlinear optimization algorithms may be applied to handle
large parameter deviations, their convergence properties need
to be established for each case.
An alternative case of robot kinematic identification tech-
niques consists of extracting the kinematic parameters from
identified orientation and position of the joint axes obtained by
tracking one or more target points located on the robot, while
moving each robot one joint at a time through a significant
portion
of
the joint travel [16]-[ 181. The technique is attractive
for studying joint imperfections. It allows an estimation of joint
features (such as center of rotation, plane of rotation, etc.)
from relatively noisy measurements of the target positions.
A disadvantage of the method is that in order to increase
the robustness of the identification, a relatively large number
of target position measurements need to be taken to perform
least squares curve fitting to a target trajectory resulting from
joint motion of each identified joint axis
[
171,
[
181. The shape
matrix approach proposed by Broderick and Cipra [19] also
employed a measurement strategy by which each joint is
individually and successively moved. A similar measurement
strategy was employed by Lenz and Tsai [20] for calibration
of a Cartesian robot.
This paper presents a linear solution for the identification
of unknown robot kinematic parameters. The solution method
employs a recently proposed robot kinematic modeling con-
vention termed the Complete and Parametrically Continuous
(CPC) model [lo], [21]. One reason for choosing the CPC
model is that there exists a sequence of pose measurements
for which all CPC link parameters except for one appear
linearly in the system of equations to be solved. Another
Manuscript received
June
14,
1991; revised July
8,
1992. Portions
of
this
paper were presented at the IEEE International Conference
on
Robotics and
is
that
the
redundant
parameters
in
the
‘pc
can be systematically eliminated, which is a crucial step in
Automation,- Sacramento, CA, May 1991.
334314991.
the solution method. While the pose measurements procedure
resembles the one used for joint axis identification, it involves
The authors are with the Florida Atlantic University,
Boca
Raton, FL
IEEE Log
Number
9207356.
a drastically reduced number of pose measurements.
1042-296X/93$03.00
0
1993 IEEE
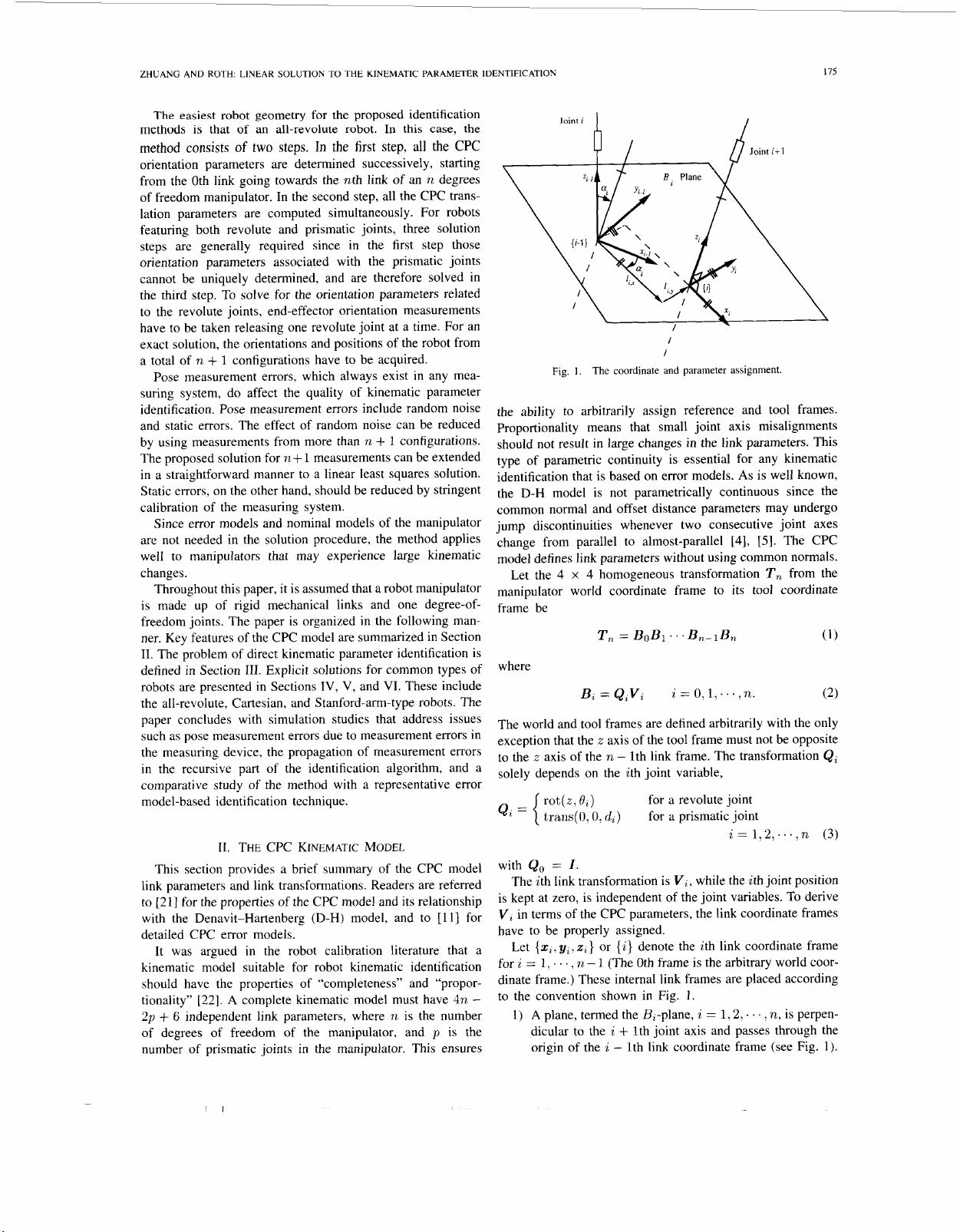
剩余11页未读,继续阅读
资源评论


haitaotao
- 粉丝: 0
- 资源: 3









最新资源
- 基于DQN算法的迷宫寻宝路径规划.docx,内附核心源码
- YOLO实时物体检测.zip
- 决策树编程实现.zip
- UDS学习笔记,诊断拷贝好的资源整理
- 基于YOLO的王者英雄人物识别-课件
- YOLOv9论文解析,训练自己的数据集,TensorRT精准部署,NCNN安卓手机部署.zip
- VESA COORDINATED VIDEO TIMING CVT v2.0 Generator Version 1 计算表格
- Android数据存储与多媒体-课件
- YOLOv8检测模块组合优化改进(成功涨点)添加GAM注意力机制添加小目标检测头替换为Wise-IoU损失函数+完整web端展示(实现简单目标跟踪功能).zip
- 基于Django+DRF实现的企业管理系统源码(前后端分离Vue+Django)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


