
1
领导——跟随编队系统运动学模型算法
1、智能小车坐标系的建立
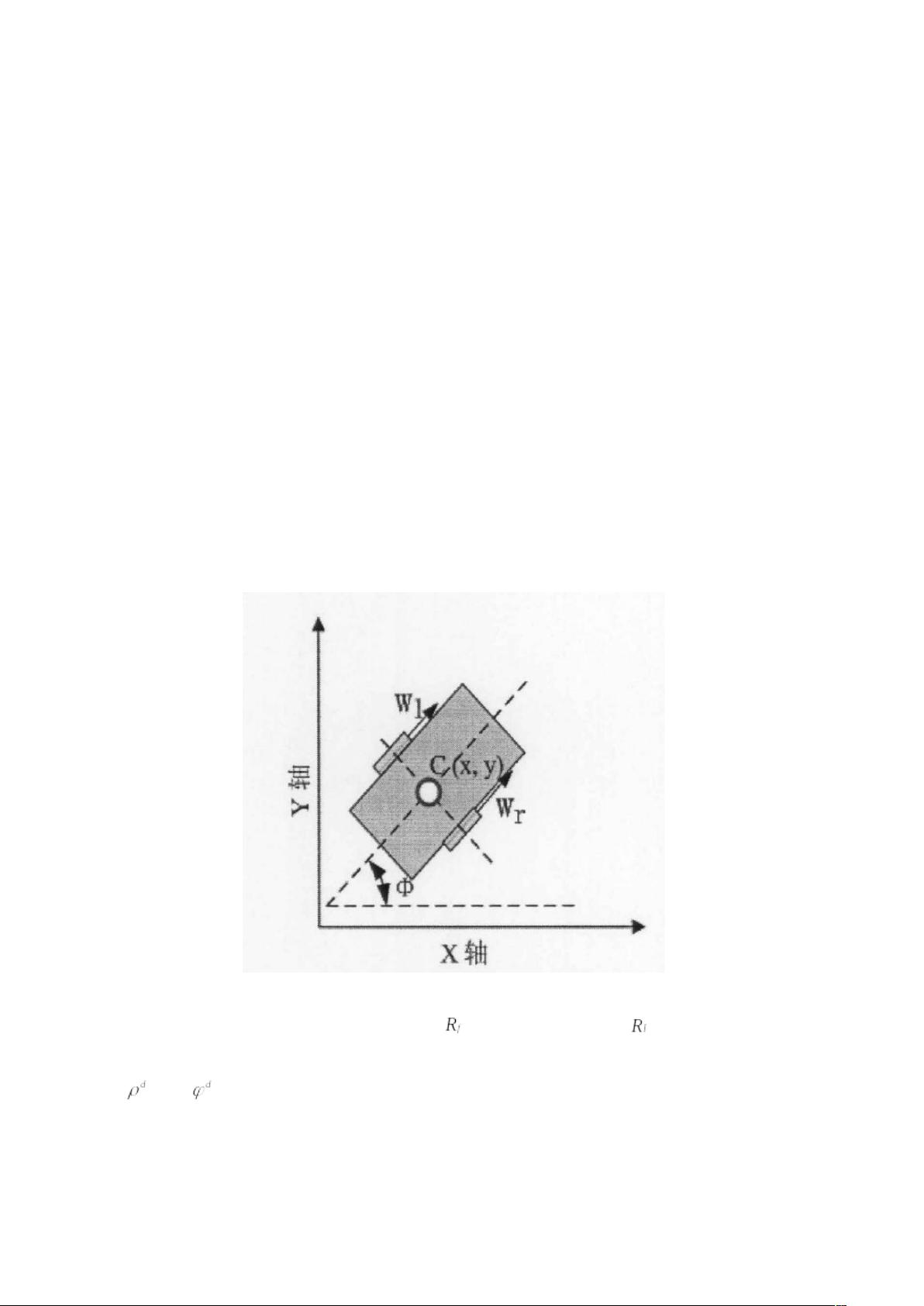
为了准确描述智能小车的实时位姿,我们分别建立了全局坐标系和局部坐标
系。全局坐标系是用来描述整个环境的信息,标识出当前智能小车的位置,如图
1 所示;局部坐标系是在某个智能小车的本体上建立的坐标系,因为智能小车在
移动过程中,每次探测的距离信息都是以当前小车的运动位姿来确定测量所得的
结果,利用局部坐标系是为了描述当前探测到的局部信息。
控制的目标是使 lower 智能小车 与 leader 智能小车 保持预设的距离
角度 。假设 lower 智能小车所要到达的理想队形位置存在一个虚拟的
图 1:智能小车在全局坐标系下的运动学模
资源评论

 xiaoyun6562018-04-10希望能有更多的文字描述来介绍一下算法,对不对还不敢确定
xiaoyun6562018-04-10希望能有更多的文字描述来介绍一下算法,对不对还不敢确定 QiGroup2019-09-04感觉没什么价值
QiGroup2019-09-04感觉没什么价值











