
自动循迹小车
一、系统设计
1、设计要求
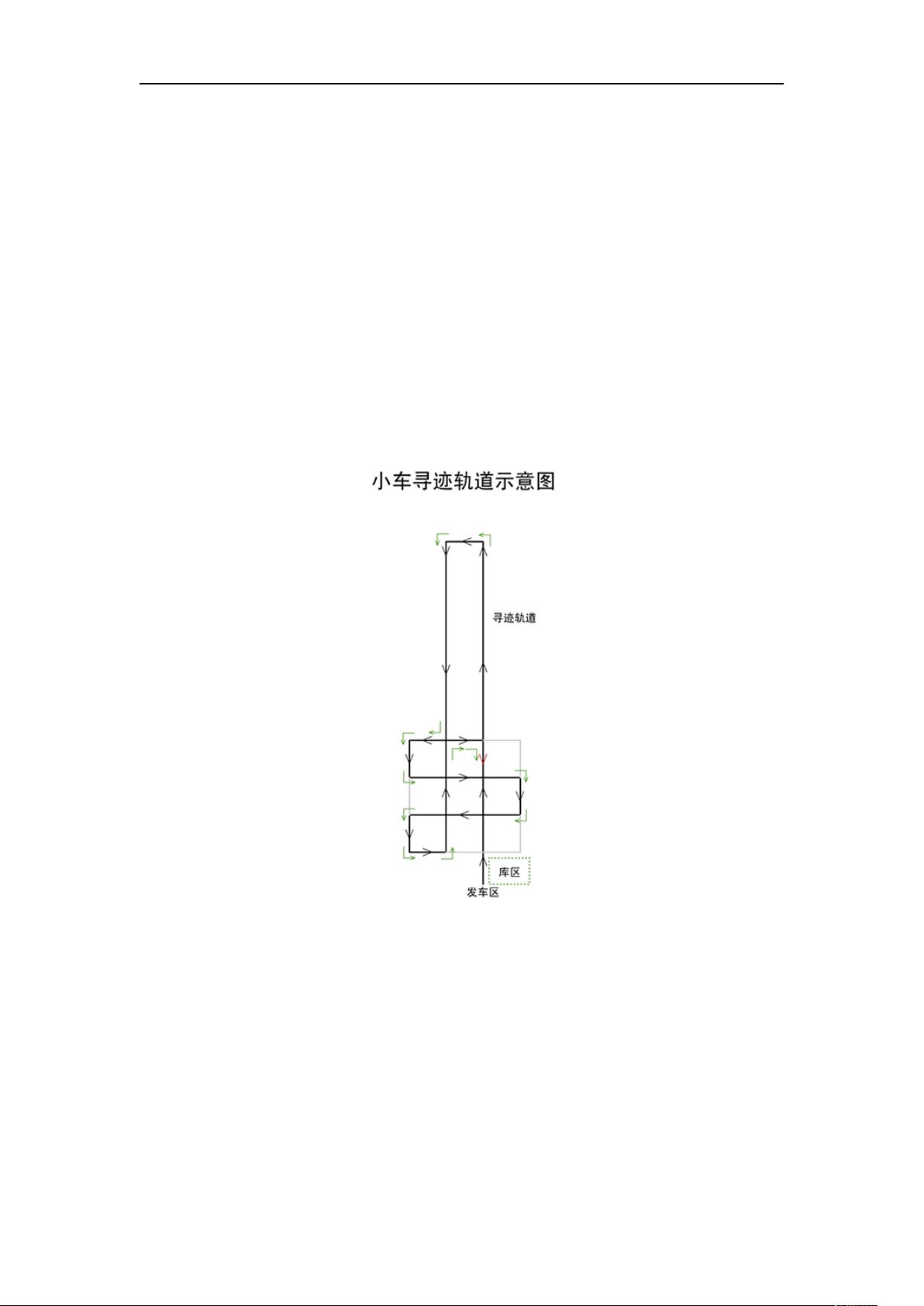
(1)自动寻迹小车从安全区域启动。
(2)小车按指定路线运行,自动区分直线轨道和弯路轨道,在指定弯路处
拐弯,实现灵活前进、转弯、倒退等功能,在轨道上划出设定的地图。
(3)小车完成指定运行任务后,自动返回出发起点,自动倒车,入库。
寻迹路线如图 1 所示:
2、小车循迹的原理
这里的循迹是指小车在黑色地板上循白线行走,通常采取的方法是红外探
测法。
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的
特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地
板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光
被吸收,小车上的接收管接收不到红外光。单片机就是否收到反射回来的红外
1
剩余9页未读,继续阅读
资源评论

 zzy720132013-03-11说明书还是不很详细
zzy720132013-03-11说明书还是不很详细 xiaoxiaolang5212013-06-04循迹方面做的不错,希望努力更新啊
xiaoxiaolang5212013-06-04循迹方面做的不错,希望努力更新啊- he4711542012-11-14在循迹方面做的好,只是怎样完成感应还没说清楚











