小车推球
组员:褚海洋、郑星星、董斐斐。
辅导老师:李卫国
摘要 设计分为 4 个模块:轨迹探测模块、小球探测模块、光源探测
模块、PWM 驱动模块。探测模块利用三个光感元件,对黑色轨道进
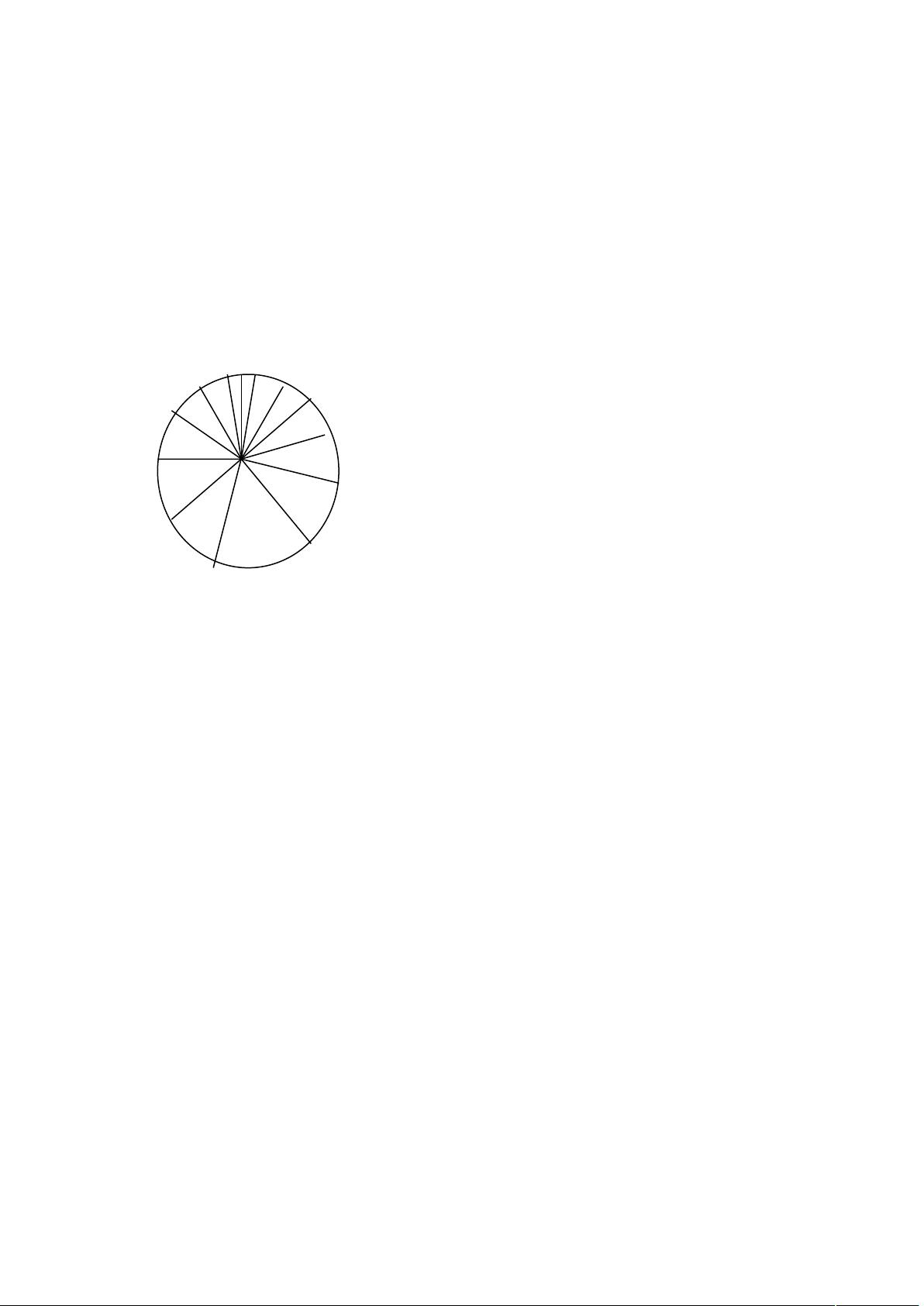
行寻迹;小球探测模块用于对小球进行探测;光源探测模块利用十
三个光敏电阻制成,用于寻光并确定光源角度,以期获得较为精确
的转向值;PWM 驱动电路用于转向控制和速度控制。
一、寻迹方案
方案:用三只光电对管。
探测黑线的大致原理:光线照射到路面并反射,由于黑线与白线的
反射系数不同,可根据接收到的反射光的强弱判断小车是否在黑线
上巡迹。由此我们设置了三个传感器分部于小车前端。
一只置于轨道中间,两只置于轨道外侧,当小车脱离轨道时,
即当置于中间的一只光电开关脱离轨道时,等待外面任一只检测到
黑线后,做出相应的转向调整,直到中间的光电开关重新检测到黑
线(即回到轨道)再恢复正向行驶。虽然小车在寻迹过程中可能有
一定的左右摇摆,但只要控制好行驶速度就可保证车身基本上接近
于沿靠轨道行驶。