
MOTION CONTROLLER FOR STEPPER MOTORS INTEGRATED CIRCUITS
TRINAMIC Motion Control GmbH & Co. KG
Hamburg, Germany
TMC429 DATASHEET
Triple Stepper Motor Ramp Generator Controller with Serial Peripheral Interfaces and Step/Direction
Fully Compatible Successor of the TMC428
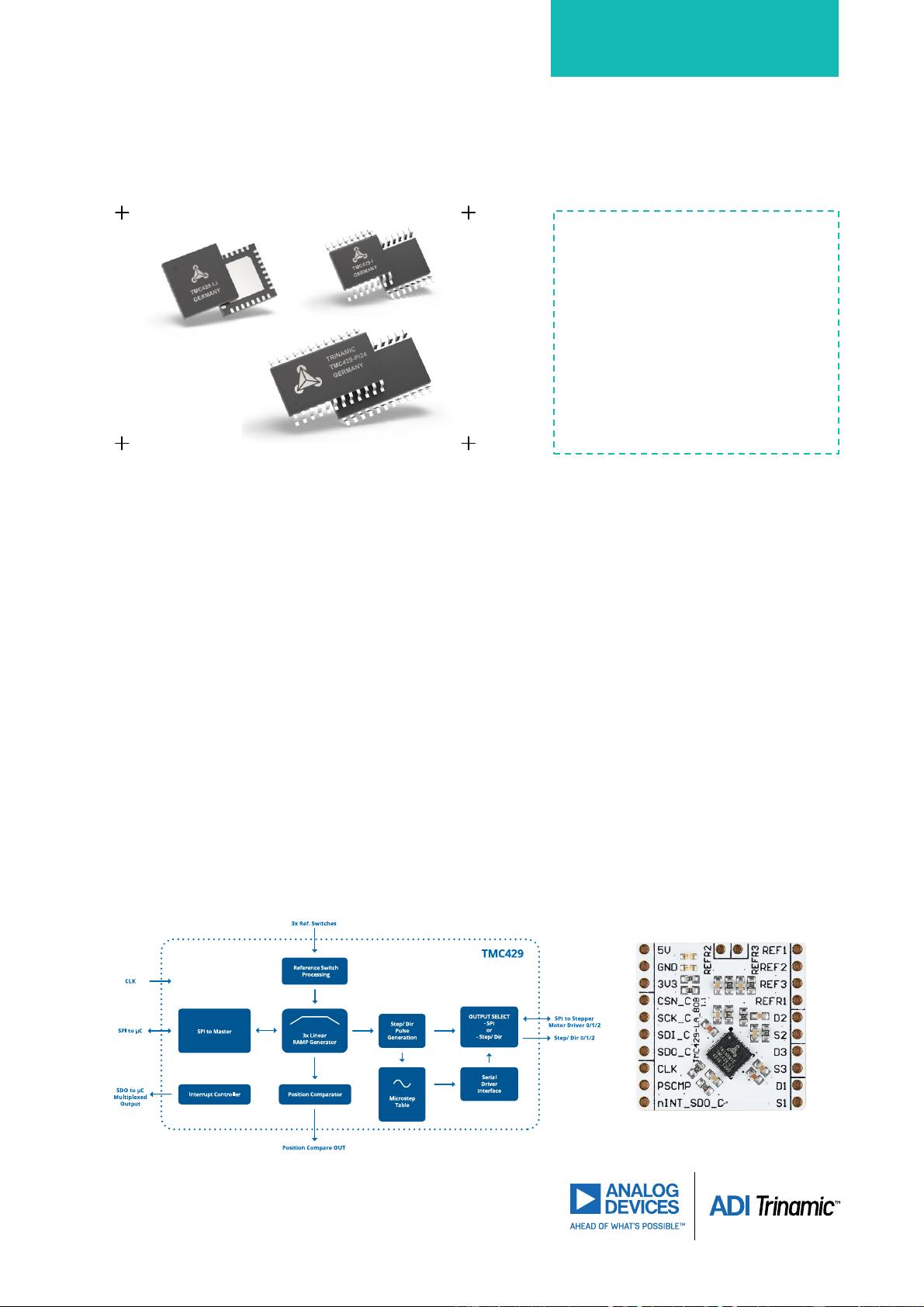
BLOCK DIAGRAM
FEATURES AND BENEFITS
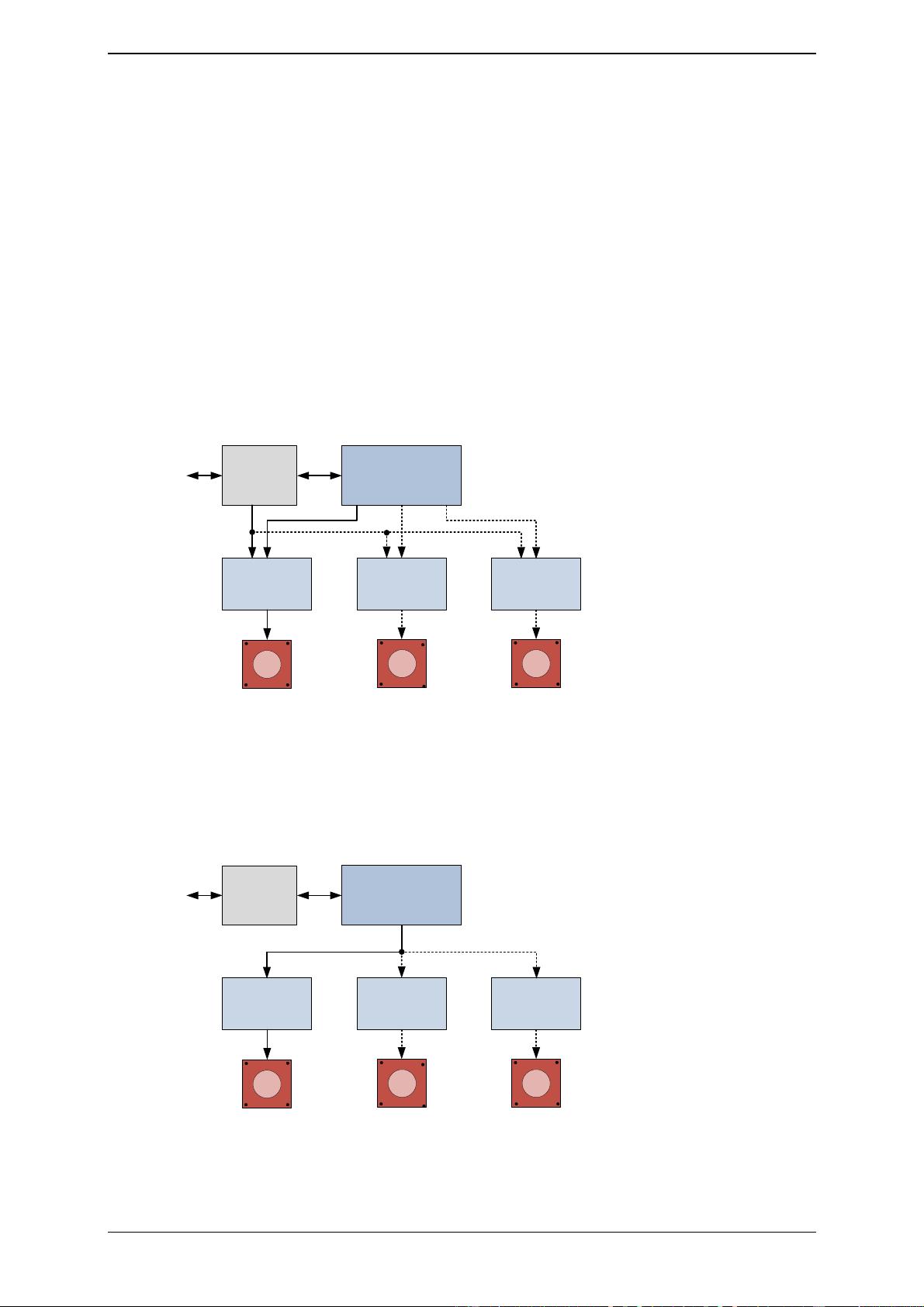
Controls up to three stepper motors
3.3 V or 5 V operation with CMOS / TTL compatible IOs
Serial 4-wire interface for µC with easy-to-use protocol
Interface for SPI™ motor drivers with data rates up to 1 Mbit/s
Step/Direction interface to control any Step&Dir driver
Clock frequency: up to 32 MHz (can use CPU clock)
Internal position counters 24 bit wide
Microstep frequency up to 1 MHz
Read-out option for all motion parameters
Programmable 6-bit microstep table for SPI drivers
Ramp generators for autonomous positioning / speed control
On-the-fly change of target motion parameters
Homing and Stop Switch Monitoring integrated for 1-3 switches
Power boost automatic acceleration dependent current control
Low power operation: 1.25 mA at 4 MHz (typ.)
Compact Size: ultra-small 16 pin SSOP package, 24 pin SOP
package, and 32 pin QFN 5x5 mm package
Directly controls TMC26x, TMC2660, TMC2590, TMC246, TMC249
APPLICATIONS
CCTV, Security
Antenna Positioning
Heliostat Controller
Battery powered applications
Office Automation
ATM, Cash recycler, POS
Lab Automation
Liquid Handling
Medical
Printer and Scanner
Pumps and Valves
DESCRIPTION
The TMC429 is a miniaturized stepper motor
controller with an industry leading feature
set. It controls up to three motors via SPI or
Step/Direction interface. Using Trinamic
Step&Dir drivers, up to 256 microstep
resolution realize highly precise motion.
Based on target positions and velocities -
which can be altered on the fly - it performs
all real time critical tasks autonomously. The
TMC429 offers high level control functions for
robust and reliable operation. Two separate 4
wire serial peripheral interfaces allow for
communication with the microcontroller and
with up to three daisy chained stepper motor
drivers.
Together with a microcontroller the TMC429
forms a complete motion control system.
High integration and small form factor allow
for miniaturized designs for cost-effective and
highly competitive solutions.
PROTOTYPING BOB



剩余82页未读,继续阅读
资源评论



cat_milk
- 粉丝: 138
- 资源: 8









最新资源
- 52036280467357957001734701299977.jpg
- 52292422648120956871733523098304.jpg
- 你的第一个博客-全套运行代码
- Node.JS网盘系统
- 车辆、飞机、船检测22-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 时间转换工具(BD时、GPS时、UTC时、北京时间相互转换,可计算日期)
- 坐标转换工具(LBH、XYZ、NEH互相转换,可批量)
- VueWeb 管理系统完成示例(登录、列表、详情、echars图表、地图)
- 车辆、飞机、船检测13-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 基于51单片机的空气质量烟雾可燃气体检测系统.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


