TMC5130_datasheet.pdf
需积分: 45 71 浏览量
2020-07-06
09:20:29
上传
评论 1
收藏 13.36MB PDF 举报

POWER DRIVER FOR STEPPER MOTORS INTEGRATED CIRCUITS
TRINAMIC Motion Control GmbH & Co. KG
Hamburg, Germany
TMC5130A-TA DATASHEET
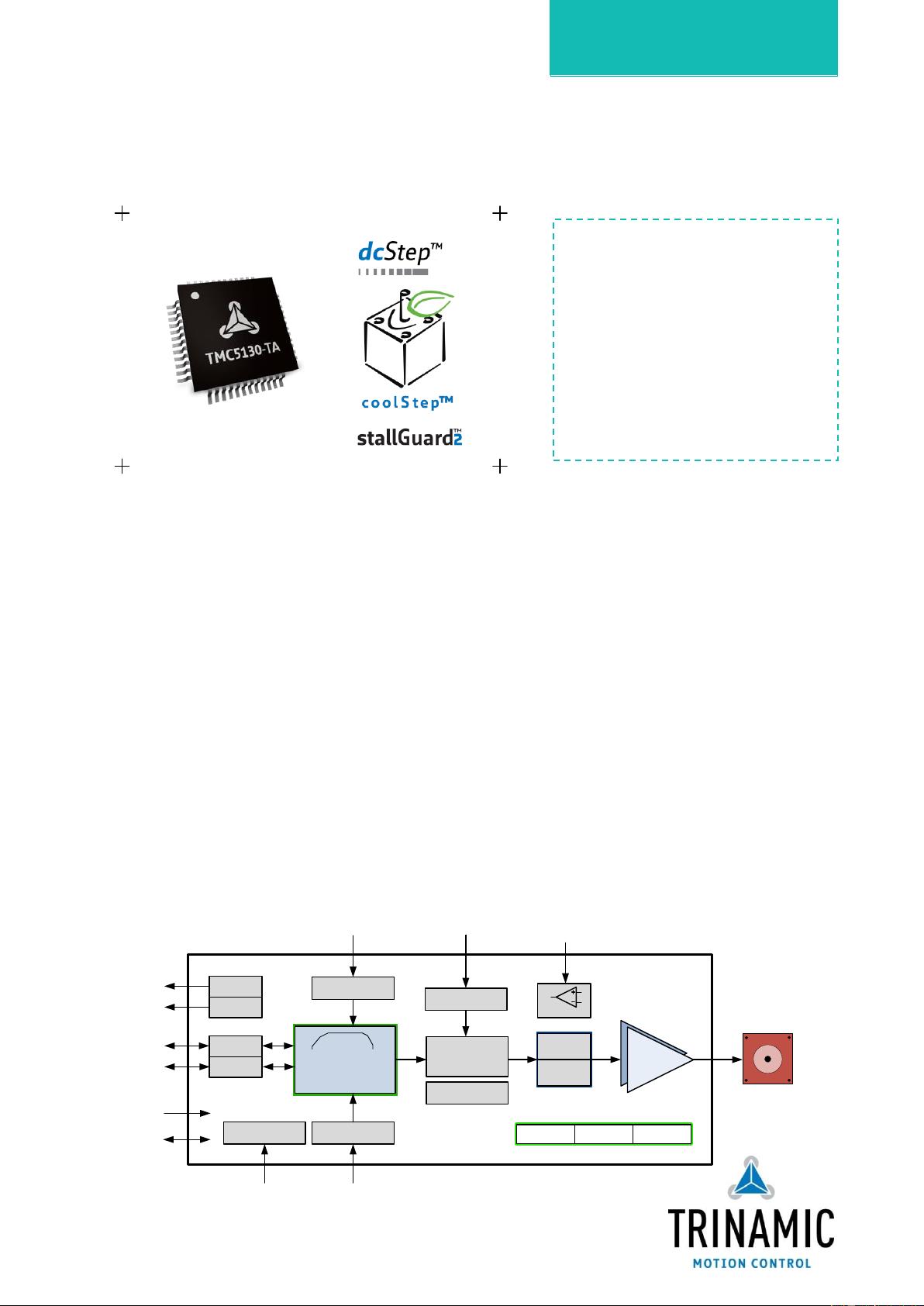
FEATURES AND BENEFITS
2-phase stepper motors up to 2A coil current (2.5A peak)
Motion Controller with sixPoint™
ramp
Step/Dir Interface with microstep interpolation microPlyer™
Voltage Range 4.75… 46V DC
SPI & Single Wire UART
Encoder Interface and 2x Ref.-Switch Input
Highest Resolution 256 microsteps per full step
stealthChop™ for extremely quiet operation and smooth motion
spreadCycle™ highly dynamic motor control chopper
dcStep™ load dependent speed control
stallGuard2™ high precision sensorless motor load detection
coolStep™ current control for energy savings up to 75%
Integrated Current Sense Option
Passive Braking and freewheeling mode
Full Protection & Diagnostics
Compact Size 9x9mm
2
TQFP48 package
APPLICATIONS
Textile, Sewing Machines
Factory Automation
Lab Automation
Liquid Handling
Medical
Office Automation
CCTV, Security
ATM, Cash recycler
POS
Pumps and Valves
Heliostat Controller
DESCRIPTION
The TMC5130A is a high performance
stepper motor controller and driver IC
with serial communication interfaces. It
combines a flexible ramp generator for
automatic target positioning with
industries’ most advanced stepper motor
driver. Based on TRINAMICs sophisticated
stealthChop chopper, the driver ensures
absolutely noiseless operation combined
with maximum efficiency and best motor
torque. High integration, high energy
efficiency and a small form factor enable
miniaturized and scalable systems for
cost effective solutions. The complete
solution reduces learning curve to a
minimum while giving best performance
in class.
Universal high voltage controller/driver for two-phase bipolar stepper motor. stealthChop™ for quiet
movement. Integrated MOSFETs for up to 2 A motor current per coil. With Step/Dir Interface and SPI.
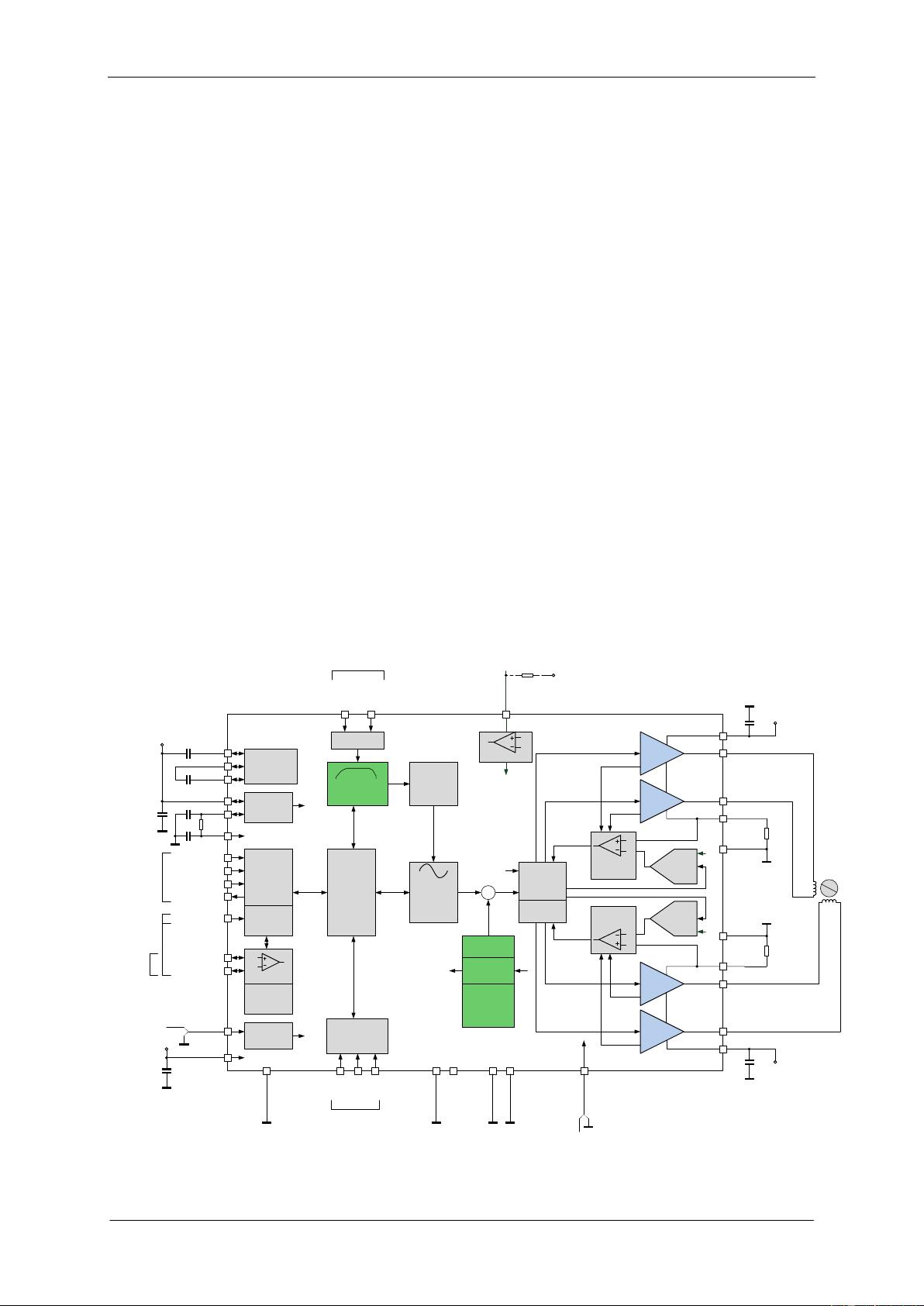
BLOCK DIAGRAM
spreadCycle
stealthChop
MOTION CONTROLLER
with Linear 6 Point
RAMP Generator
DRIVER
TMC5130A
Programmable
256 µStep
Sequencer
Protection
& Diagnostics
Ref. Switches
SPI
stallGuard2 coolStep dcStep
Power
Supply
Charge
Pump
ABN
Motor
Encoder Unit
Step/Dir
Step Multiplyer
spreadCycle
stealthChop
DAC Reference
IREF
optional current scaling
Reference Switch
Processing
Interrupts
Position
Pulse Output
UART
Single Wire
SPI to
Master
UART
CLK
CLK
Oscillator / Selector


剩余127页未读,继续阅读
资源评论


鸳鸯冰笔
- 粉丝: 91
- 资源: 6









最新资源
- rain-ripples.PNG
- Gitlab: Python项目CI/CD实践 > fastapi-t1 > Dockerfile
- springboot的校园失物招领系统源码.zip
- Skeleton-Low Poly 低多边形骨架模型Unity插件美术资源包unitypackage
- Direct X修复工具
- Android教你如何一分钟实现下拉刷新功能项目完整实例代码
- 基于SpringBoot校园失物招领系统 前后端分离项目(mysql脚本在后端程序中).zip
- 使用JSTL需要的jar包程序文件
- 潘晓庆 321023199101293449。23-24年.xls
- 目标检测数据集(YOLOV5目录格式):花生检测(2类别,包含训练集、验证集)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


