

基于神经网络的多传感器信息融合技术
在移动机器人中的应用
摘 要:基于模糊神经网络的多传感器信息融合,提出了一种简单、
有效的分区算法来确定障碍物的距离和方位。采用 BP 神经网络对
障碍物环境进行分类以及模式识别,为移动机器人的导航和避障提
供了一种有效的方法。
关键词:可移动机器人;多传感器信息融合;神经网络
0 引 言
可移动机器人的迅速发展,扩大了它在各个行业的应用,其工作的空间和环境也日益复
杂。为了实现机器人在非结构化环境中安全、自主地完成各项任务,必须获得外界环境准
确、统一的信息描述。单一的传感器在获取信息上的诸多缺点限制了机器人更高层控制系
统决策和判断的准确性,因此,在机器人中应用多个传感器,采用信息融合技术进行多传
感器信息处理,是赋予机器人更高职能的关键技术之一。将数据融合技术引入到机器人环
境障碍物分类领域,能显著地提高多传感器系统对环境分类的准确率;可以增加测量维数,
消除不确定因素的影响,扩展时间和空间的覆盖范围,降低对单个传感器的性能要求;能
够充分发挥每一个传感器信息源的作用,利用各数据源间冗余和互补信息。文中设计的可
移动机器人传感器系统,应用模糊神经网络技术创建并训练神经网络,采用自行设计的 BP
神经网络对多传感器信息进行融合,为可移动机器人的避障和导航提供决策依据。
1 基于神经网络技术的多传感器信息融合
本系统的移动机器人模型中采用了多个超声波传感器,分布在移动机器人的不同部位,
检测不同方向上的信息,用于探测机器人所处环境中的障碍物信息。通过融合多个传感器
对周围障碍物对象的冗余和比较完全的表达,将减小由于各传感器的感知误差而带来的整
个系统的不确定性。
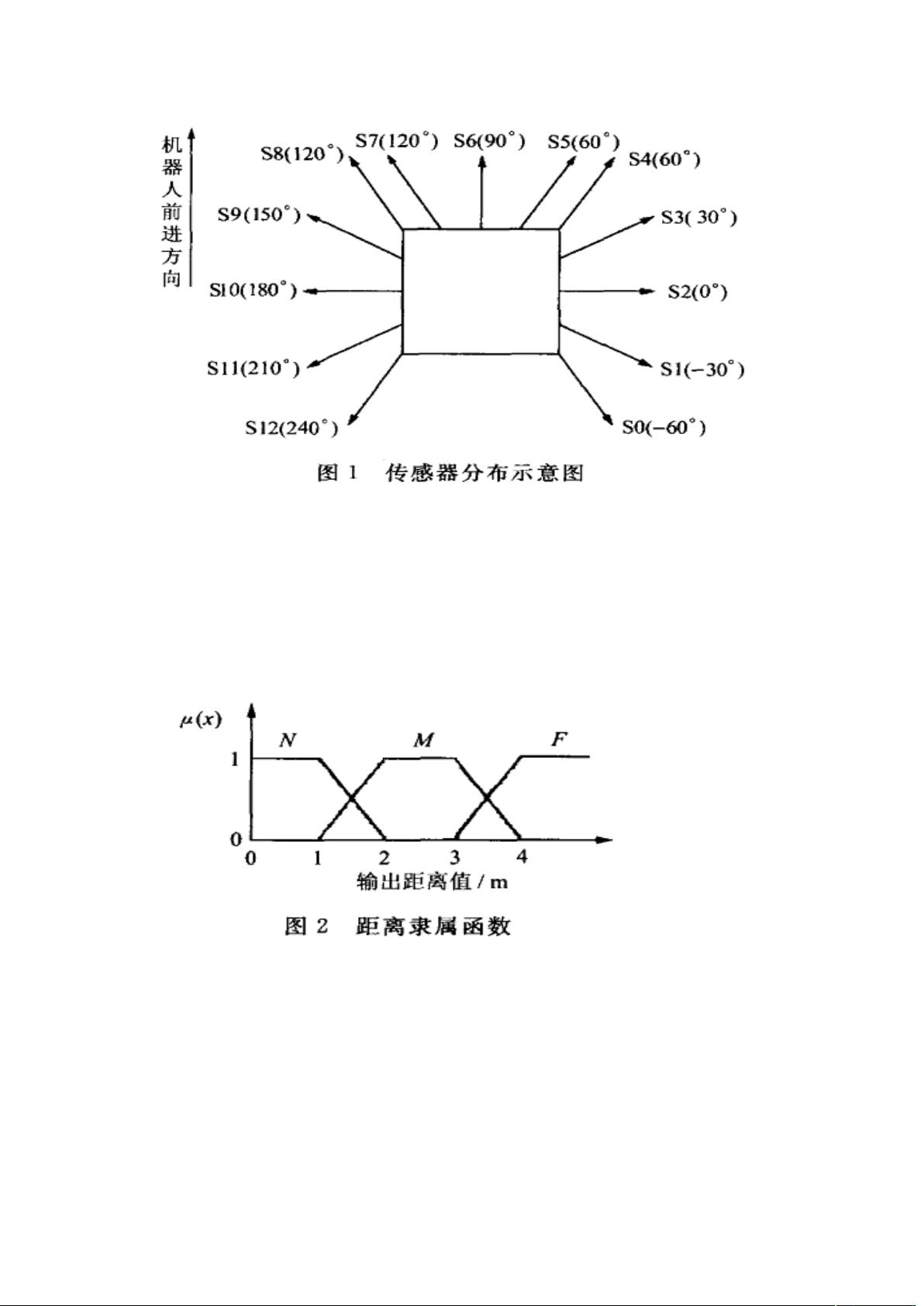
根据机器人设计尺寸,相邻两对传感器间的角度为 3O。,在机器人周围共布置 13 个超
声波传感器(测距范围 5 m),传感器的分
剩余8页未读,继续阅读
资源评论


butterflyfly007
- 粉丝: 1
- 资源: 1









最新资源
- 基于Python和HTML的Chinese-estate-helper房地产爬虫及可视化设计源码
- 基于SpringBoot2.7.7的当当书城Java后端设计源码
- 基于Python和Go语言的开发工具集成与验证设计源码
- 基于Python与JavaScript的国内供应商管理系统设计源码
- aspose.words-20.12-jdk17
- 基于czsc库的Python时间序列分析设计源码
- 基于Java、CSS、JavaScript、HTML的跨语言智联平台设计源码
- 基于Java语言的day2设计源码学习与优化实践
- 基于浙江大学2024年秋冬学期软件安全原理与实践的C与Python混合语言设计源码
- 基于FastAPI和Vue3的表单填写与提交前后端一体化设计源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


