


计算机技术及应用
信息技术与信息化
42
2009年第 2期
基于黑白摄像头的智能小车路径识别系统设计
The Design of Intelligent Vehicle Path Recognition Based on Monochrome Camera
吴吟箫
3
张 虹 王新生
WU Yin - xiao ZHANG Hong WANG X in - sheng
doi: 10. 3969 / j. issn. 1672 - 9528. 2009. 02. 015
摘 要 路径识别是汽车智能化发展的必然趋势。在基于飞思卡尔单片机的智能车路径识别系统的设计中 ,首
先采用基于黑白摄像头的图像采样模块获取路径图像信息 ;然后分别说明图像采集 ,图像预处理 ,黑线
提取 ,路径判断部分的软件设计。其中 ,在图像预处理中使用了二值化和中值滤波算法 ,并且在黑线提
取中提出了改进插值算法。实验表明 ,整个系统硬件设计简单 ,软件算法快速有效。
关键词 路径识别 中值滤波 寻线算法
Abstract Intelligentize of vehicle is a trend of cars’development in the future. Path recognition is one of
the application directions. This path recognition system of intelligent car uses image - sensor module based on
camera to obtain lane image information. The whole system is divided into four parts: image acquisition, image
pre - processing, abstracting the black line, and road detection. The image pre - processing part uses the binary2
zation and the median filtering to improve the image information. Then by using the improved algorithm, the result
of abstracting the black line becomes more precise. The ultimate aim of the whole system is to accurately abstract
the black guidelines from the white raceway, following the road parameters and conditions in front, making the car
move properly.
Keywords Road detection Median filtering L ine - tracking
3 哈尔滨工业大学
(
威海
)
信息科学与工程学院 264209
基金项目 :山东省自然科学基金
(
Y2007G20
)
1 引言
智能化技术与汽车相结合产生的智能汽车将在未来工业生
产和日常生活中扮演重要的角色 ,而路径识别则正是体现智能车
智能水平的一个重要标志。
本文中智能小车路径识别系统基于摄像头和飞思卡尔 16位
微控制器 MC9S12DG128B组成 ,由摄像头采集图像有用信息送入
单片机分析道路参数。智能小车的运行环境
[1 ]
如图 1所示。其
中 ,跑道黑线宽度为 25mm;跑道最小曲率半径不小于 500mm;跑
道可以交叉 ,交叉角为 90°。一个完整的路径识别系统不仅需要
具备图像信号的采集功能 ,还要求完成图像信号的分析及处理算
法。因而 ,本系统分成四个模块 :视频图像采集、图像预处理、黑
线中心提取、路径判断。
2 视频图像采集
视频图像的采集是基于 MC9S12DG128 单片机来实现的。
MC9S12DG128B是 Freescale开发的以 CPU12内核为核心的单片
机 ,采用 5V供电 ,总线速度 25MHz, 8KBRAM , 128KBFLASH,具有
丰富的 I/O模块和工业控制专用的通信模块
[2 ]
。
由于采用摄像头寻迹能大幅度提升赛车的前瞻距离 ,有利于
赛车提高车速。同时 ,赛道上只有黑白两色 ,只需提取探测画面
的灰度信息就能识别出黑线信息 ,因而从减少成本和减轻单片机
采样的负担两方面考虑 ,图像采集部分选用黑白摄像头。
摄像头输出的是 PAL制式的复合全电视信号 ,每秒输出 25
帧
(
每帧分为偶场和奇场
)
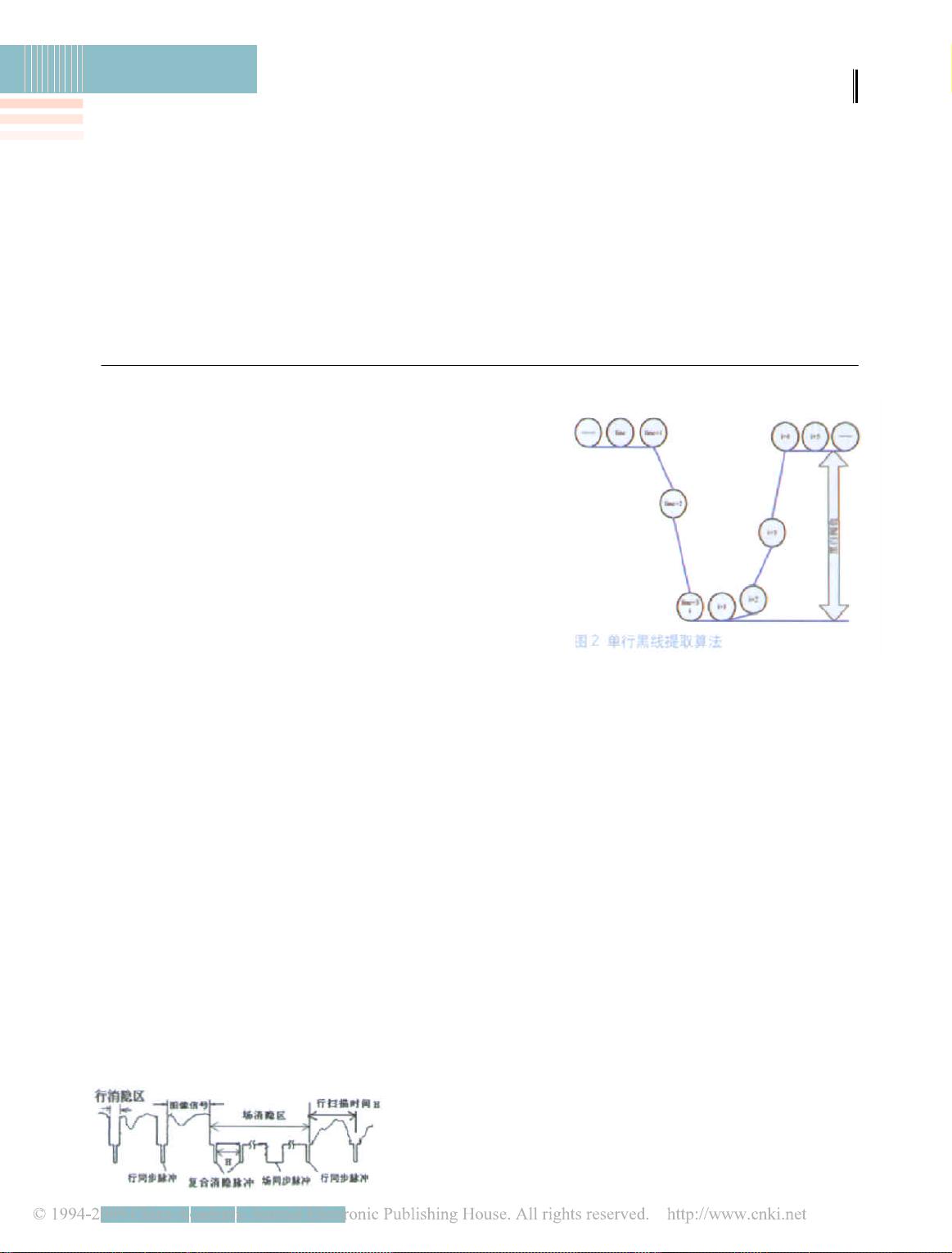
。黑白视频图像信号通常由图像信号、
消隐信号以及同步信号共同组成
[3 ]
。
图 1 智能小车的跑道环境
要能有效地采样摄像头视频信号 ,首先要提取出摄像头信号
中的行同步脉冲 ,消隐脉冲和场同步脉冲。LM1881视频同步信
号分离芯片可从摄像头信号中提取信号的时序信息 ,如行同步脉
冲、场同步脉冲和奇、偶场信息等 ,并将它们转换成 TTL电平直接
输给单片机的 I/O口作控制信号之用 ,如图 2。
这部分的硬件设计为 :摄像头视频信号接入 LM1881的视频
信号输入端 ,同时接入单片机其中一个 A /D口
(
这里选择 PAD8
口
)
; LM1881的行同步信号和奇偶场同步信号分别接入单片机的
带中断的 I/O口 PT0、PT1。设置 PT1口为输入捕捉下降沿 ,即采
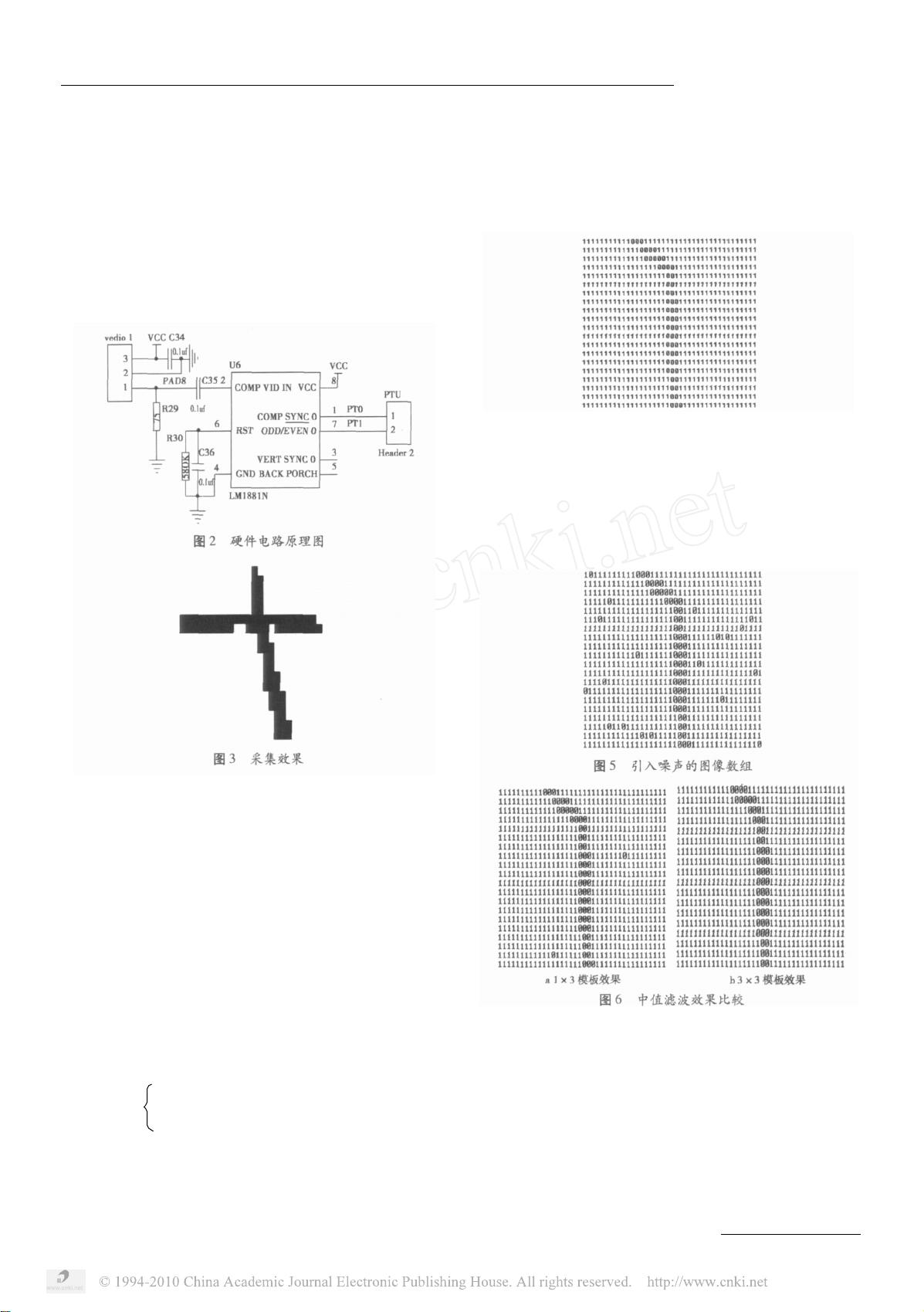













评论1