# Course Simulation Project -- Inverted Pendulum with Fuzzy Controller
In this project, a inverted pendulum system controled by a simple fuzzy controller is simulated in the Matlab environment. The main refereence is the book "*Fuzzy Control*" [1]. The main purpose is to evaluate effects of different parameters. There are three types of files: supported functions, simulation functions and simulation results.
# Supported Functions
1. Model of the inverted pendulum system `InvertedPendulum.m`: Calculate the current enviroment values based on values of previous time step;
2. Fourth order Runge Kutta method `ODE_RK.m`: Solve the ODE by using the fourth order Runge Kutta method. It is used in the `InvertedPendulum.m`;
3. Fuzzy Controller `FuzzyController.m`: Based on the user's settings and measured values to calculate the force which will transferred to the inverted pendulum system. It is only contains two inputs and one outputs. One input is the angle error. Another input is the angle speed error. The output is the force.
4. `ConvertEps2Pdf.sh`: Convert simulation results from eps figures to pdf figures. Only for Mac OS System. How to use it: In terminal, run `chmod +x ./ConvertEps2Pdf.sh;./ConvertEps2Pdf.sh`
# Simulation Functions
1. `test_membershipfunction.m`: Plot the membership functions based on the user's settings. Example results are `e_membershipfunction.pdf`, `de_membershipfunction.pdf` and `F_membershipfunction.pdf` in `Test_Results` floder.;
2. `test_InvertedPendulum_without_controller.m`: Test the model of the inverted pendulum. No control is performed. Example results are `without_control_1.pdf` and `without_control_2.pdf` in `Test_Results` floder.;
3. `test_InvertedPendulum_with_fuzzy_controller.m`: Simulate the fuzzy control process of the inverted pendulum. Example results are `force_**.pdf` and `angleandposition_**.pdf` in `Test_Results` floder.
4. `Diff_Parameters_Diff_Results_triangle_min.m`: This file is to show the simulation results for effects of different parameters. Simulation results are in the `Simulation_Results_triangle_min` floder (Membership functions are triangular. And use minimum to represent the premise and implication and COG classification)
4. `Diff_Parameters_Diff_Results_Gaussian_product.m`: This file is to show the simulation results for effects of different parameters. Simulation results are in the `Simulation_Results_Gaussian_product` floder (Membership functions are Gaussian. And use product to represent the premise and implication and COG classification)
5. `Diff_Parameters_Diff_Results_49rules.m`: For the previous simulations, only 25 rules are used. This simulation is to show the effect of rule base. The number of rules is increased to 49.
# Simulation Results
1. There are some example results for testing simulation functions in the folder `Test_Results`. These example all follows the section "2.4 Simple Desgin Example: The Inverted Pendulum" of [1].
2. Simulation results of `Diff_Parameters_Diff_Results_triangle_min.m` are all in the folder `Simulation_Results_triangle_min`. These simulations also follows the section "2.4 Simple Desgin Example: The Inverted Pendulum" of [1].
3. Simulation results of `Diff_Parameters_Diff_Results_Gaussian_product.m` are all in the folder `Simulation_Results_Gaussian_product`. These simulations are for "2.10 Design Problem 2.1" of [1].
4. Simulation results of `Diff_Parameters_Diff_Results_49rules.m` are all in the folder `Simulation_Results_49rules`. These simulations are for "2.10 Design Problem 2.1" of [1].
# Just for Fun
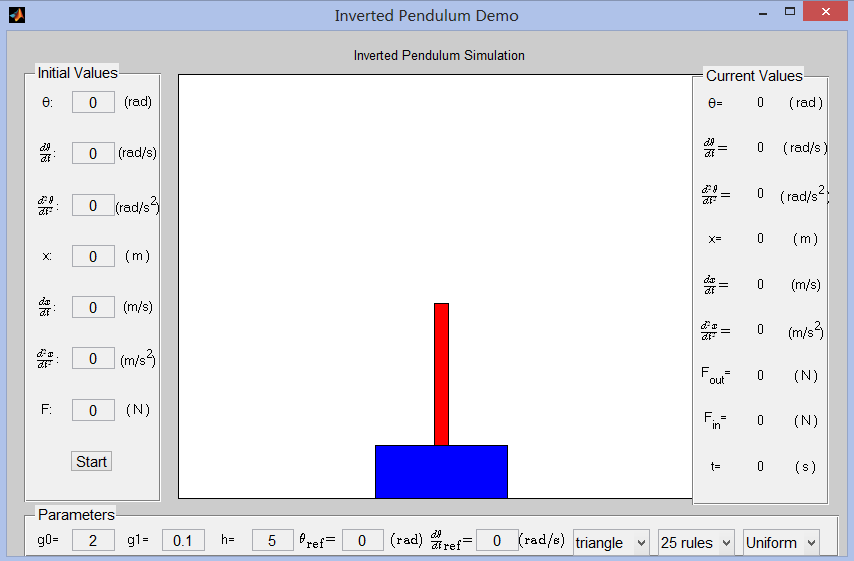
`GUI_InvertedPendulumSimulation.m` is only for fun. ( ̄┰ ̄)
In MATLAB R2020b (Windows), the GUI is tested successfully.
# Reference
[1] K. M. Passion and S. Yurkovich, *Fuzzy Cntrol*. Menlo Park, CA: Addison-Wesley, 1998.
毕业设计&课设-基于模糊控制器的倒立摆Matlab仿真.zip

需积分: 2 51 浏览量
2024-01-06
21:32:05
上传
评论
收藏 4.98MB ZIP 举报
 毕业设计&课设-基于模糊控制器的倒立摆Matlab仿真.zip (143个子文件)
毕业设计&课设-基于模糊控制器的倒立摆Matlab仿真.zip (143个子文件)  Control_Surface_NotUniform_Center.eps 1.85MB Control_Surface_Uniform_Center.eps 1.85MB Control_Surface_NotUniform_Center.eps 726KB Control_Surface_NotUniform_Center.eps 726KB Control_Surface_Uniform_Center.eps 726KB Control_Surface_Uniform_Center.eps 726KB g0-1_g1-0dot1_h-1_AngleAndPosition.eps 67KB g0-2_g1-0dot1_h-5_AngleAndPosition.eps 67KB g0-2_g1-1_h-5_AngleAndPosition.eps 66KB g0-2_g1-0dot1_h-1_AngleAndPosition.eps 66KB g0-1_g1-1_h-1_AngleAndPosition.eps 66KB g0-2_g1-2_h-5_AngleAndPosition.eps 65KB g0-1_g1-0dot1_h-1_AngleAndPosition.eps 65KB g0-1_g1-0dot1_h-1_AngleAndPosition.eps 65KB g0-2_g1-0dot1_h-1_AngleAndPosition.eps 64KB g0-2_g1-1_h-1_equal_g1-0dot1_AngleAndPosition.eps 64KB g0-2_g1-0dot1_h-1_AngleAndPosition.eps 64KB g0-10_g1-2_h-5_AngleAndPosition.eps 64KB g0-1_g1-1_h-1_AngleAndPosition.eps 64KB g0-1_g1-1_h-1_AngleAndPosition.eps 64KB g0-2_g1-0dot1_h-10_NotUniform_NoForce_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-10_Uniform_NoForce_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-1_equal_h-5_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_AngleAndPosition.eps 63KB g0-20_g1-2_h-5_Force_NotUniform_AngleAndPosition.eps 63KB g0-20_g1-2_h-5_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_Force_Not_Uniform_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-10_Uniform_Force_AngleAndPosition.eps 63KB g0-20_g1-2_h-5_Force_Uniform_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-10_NotUniform_Force_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_Force_Uniform_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_ForceAndAcceleration.eps 54KB g0-1_g1-0dot1_h-1_ForceAndAcceleration.eps 53KB g0-2_g1-1_h-5_ForceAndAcceleration.eps 53KB g0-1_g1-1_h-1_ForceAndAcceleration.eps 52KB g0-2_g1-0dot1_h-1_ForceAndAcceleration.eps 52KB g0-2_g1-0dot1_h-1_ForceAndAcceleration.eps 51KB g0-2_g1-1_h-1_equal_g1-0dot1_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-1_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-5_Force_Uniform_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-10_Uniform_Force_ForceAndAcceleration.eps 51KB g0-20_g1-2_h-5_Force_Uniform_ForceAndAcceleration.eps 51KB g0-20_g1-2_h-5_Force_NotUniform_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-10_NotUniform_NoForce_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-10_NotUniform_Force_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-10_Uniform_NoForce_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-1_equal_h-5_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-5_ForceAndAcceleration.eps 51KB g0-2_g1-2_h-5_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-5_ForceAndAcceleration.eps 51KB g0-1_g1-0dot1_h-1_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-5_Force_Not_Uniform_ForceAndAcceleration.eps 51KB g0-20_g1-2_h-5_ForceAndAcceleration.eps 50KB g0-1_g1-1_h-1_ForceAndAcceleration.eps 50KB g0-1_g1-0dot1_h-1_ForceAndAcceleration.eps 50KB g0-1_g1-1_h-1_ForceAndAcceleration.eps 50KB g0-10_g1-2_h-5_ForceAndAcceleration.eps 50KB .gitattributes 378B GUI_InvertedPendulumSimulation.m 34KB Diff_Parameters_Diff_Results_triangle_min.m 21KB Diff_Parameters_Diff_Results_Gaussian_product.m 15KB Diff_Parameters_Diff_Results_49rules.m 14KB FuzzyController.m 7KB test_InvertedPendulum_with_fuzzy_controller.m 7KB test_membershipfunction.m 6KB test_InvertedPendulum_without_controller.m 3KB InvertedPendulum.m 3KB ODE_RK.m 928B README.md 4KB
Control_Surface_NotUniform_Center.eps 1.85MB Control_Surface_Uniform_Center.eps 1.85MB Control_Surface_NotUniform_Center.eps 726KB Control_Surface_NotUniform_Center.eps 726KB Control_Surface_Uniform_Center.eps 726KB Control_Surface_Uniform_Center.eps 726KB g0-1_g1-0dot1_h-1_AngleAndPosition.eps 67KB g0-2_g1-0dot1_h-5_AngleAndPosition.eps 67KB g0-2_g1-1_h-5_AngleAndPosition.eps 66KB g0-2_g1-0dot1_h-1_AngleAndPosition.eps 66KB g0-1_g1-1_h-1_AngleAndPosition.eps 66KB g0-2_g1-2_h-5_AngleAndPosition.eps 65KB g0-1_g1-0dot1_h-1_AngleAndPosition.eps 65KB g0-1_g1-0dot1_h-1_AngleAndPosition.eps 65KB g0-2_g1-0dot1_h-1_AngleAndPosition.eps 64KB g0-2_g1-1_h-1_equal_g1-0dot1_AngleAndPosition.eps 64KB g0-2_g1-0dot1_h-1_AngleAndPosition.eps 64KB g0-10_g1-2_h-5_AngleAndPosition.eps 64KB g0-1_g1-1_h-1_AngleAndPosition.eps 64KB g0-1_g1-1_h-1_AngleAndPosition.eps 64KB g0-2_g1-0dot1_h-10_NotUniform_NoForce_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-10_Uniform_NoForce_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-1_equal_h-5_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_AngleAndPosition.eps 63KB g0-20_g1-2_h-5_Force_NotUniform_AngleAndPosition.eps 63KB g0-20_g1-2_h-5_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_Force_Not_Uniform_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-10_Uniform_Force_AngleAndPosition.eps 63KB g0-20_g1-2_h-5_Force_Uniform_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-10_NotUniform_Force_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_Force_Uniform_AngleAndPosition.eps 63KB g0-2_g1-0dot1_h-5_ForceAndAcceleration.eps 54KB g0-1_g1-0dot1_h-1_ForceAndAcceleration.eps 53KB g0-2_g1-1_h-5_ForceAndAcceleration.eps 53KB g0-1_g1-1_h-1_ForceAndAcceleration.eps 52KB g0-2_g1-0dot1_h-1_ForceAndAcceleration.eps 52KB g0-2_g1-0dot1_h-1_ForceAndAcceleration.eps 51KB g0-2_g1-1_h-1_equal_g1-0dot1_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-1_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-5_Force_Uniform_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-10_Uniform_Force_ForceAndAcceleration.eps 51KB g0-20_g1-2_h-5_Force_Uniform_ForceAndAcceleration.eps 51KB g0-20_g1-2_h-5_Force_NotUniform_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-10_NotUniform_NoForce_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-10_NotUniform_Force_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-10_Uniform_NoForce_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-1_equal_h-5_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-5_ForceAndAcceleration.eps 51KB g0-2_g1-2_h-5_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-5_ForceAndAcceleration.eps 51KB g0-1_g1-0dot1_h-1_ForceAndAcceleration.eps 51KB g0-2_g1-0dot1_h-5_Force_Not_Uniform_ForceAndAcceleration.eps 51KB g0-20_g1-2_h-5_ForceAndAcceleration.eps 50KB g0-1_g1-1_h-1_ForceAndAcceleration.eps 50KB g0-1_g1-0dot1_h-1_ForceAndAcceleration.eps 50KB g0-1_g1-1_h-1_ForceAndAcceleration.eps 50KB g0-10_g1-2_h-5_ForceAndAcceleration.eps 50KB .gitattributes 378B GUI_InvertedPendulumSimulation.m 34KB Diff_Parameters_Diff_Results_triangle_min.m 21KB Diff_Parameters_Diff_Results_Gaussian_product.m 15KB Diff_Parameters_Diff_Results_49rules.m 14KB FuzzyController.m 7KB test_InvertedPendulum_with_fuzzy_controller.m 7KB test_membershipfunction.m 6KB test_InvertedPendulum_without_controller.m 3KB InvertedPendulum.m 3KB ODE_RK.m 928B README.md 4KB Control_Surface_NotUniform_Center.pdf 307KB Control_Surface_Uniform_Center.pdf 306KB without_control_2.pdf 202KB without_control_1.pdf 143KB angleandposition_g0-1_g1-0dot1_h-1.pdf 118KB angleandposition_g0-2_g1-0dot1_h-1.pdf 110KB Control_Surface_NotUniform_Center.pdf 110KB Control_Surface_NotUniform_Center.pdf 110KB Control_Surface_Uniform_Center.pdf 110KB Control_Surface_Uniform_Center.pdf 109KB angleandposition_g0-2_g1-0dot1_h-5.pdf 102KB force_g0-1_g1-0dot1_h-1.pdf 101KB force_g0-2_g1-0dot1_h-1.pdf 98KB e_membershipfunction.pdf 92KB force_g0-1_g1-1_h-1.pdf 90KB force_g0-2_g1-0dot1_h-5.pdf 88KB de_membershipfunction.pdf 77KB angleandposition_g0-1_g1-1_h-1.pdf 68KB F_membershipfunction.pdf 66KB g0-2_g1-0dot1_h-5_AngleAndPosition.pdf 52KB g0-2_g1-1_h-5_AngleAndPosition.pdf 49KB g0-2_g1-0dot1_h-1_AngleAndPosition.pdf 49KB g0-2_g1-0dot1_h-5_ForceAndAcceleration.pdf 46KB g0-1_g1-0dot1_h-1_AngleAndPosition.pdf 44KB g0-1_g1-1_h-1_AngleAndPosition.pdf 43KB g0-1_g1-0dot1_h-1_AngleAndPosition.pdf 41KB g0-2_g1-0dot1_h-5_Force_Uniform_AngleAndPosition.pdf 40KB g0-20_g1-2_h-5_Force_Uniform_AngleAndPosition.pdf 39KB g0-2_g1-2_h-5_AngleAndPosition.pdf 39KB g0-2_g1-1_h-5_ForceAndAcceleration.pdf 39KB
Control_Surface_NotUniform_Center.pdf 307KB Control_Surface_Uniform_Center.pdf 306KB without_control_2.pdf 202KB without_control_1.pdf 143KB angleandposition_g0-1_g1-0dot1_h-1.pdf 118KB angleandposition_g0-2_g1-0dot1_h-1.pdf 110KB Control_Surface_NotUniform_Center.pdf 110KB Control_Surface_NotUniform_Center.pdf 110KB Control_Surface_Uniform_Center.pdf 110KB Control_Surface_Uniform_Center.pdf 109KB angleandposition_g0-2_g1-0dot1_h-5.pdf 102KB force_g0-1_g1-0dot1_h-1.pdf 101KB force_g0-2_g1-0dot1_h-1.pdf 98KB e_membershipfunction.pdf 92KB force_g0-1_g1-1_h-1.pdf 90KB force_g0-2_g1-0dot1_h-5.pdf 88KB de_membershipfunction.pdf 77KB angleandposition_g0-1_g1-1_h-1.pdf 68KB F_membershipfunction.pdf 66KB g0-2_g1-0dot1_h-5_AngleAndPosition.pdf 52KB g0-2_g1-1_h-5_AngleAndPosition.pdf 49KB g0-2_g1-0dot1_h-1_AngleAndPosition.pdf 49KB g0-2_g1-0dot1_h-5_ForceAndAcceleration.pdf 46KB g0-1_g1-0dot1_h-1_AngleAndPosition.pdf 44KB g0-1_g1-1_h-1_AngleAndPosition.pdf 43KB g0-1_g1-0dot1_h-1_AngleAndPosition.pdf 41KB g0-2_g1-0dot1_h-5_Force_Uniform_AngleAndPosition.pdf 40KB g0-20_g1-2_h-5_Force_Uniform_AngleAndPosition.pdf 39KB g0-2_g1-2_h-5_AngleAndPosition.pdf 39KB g0-2_g1-1_h-5_ForceAndAcceleration.pdf 39KB共 143 条
- 1
- 2
资源评论













