TMC4671 数据表 • | 注:本文档只是用于个人使用,并非官方翻译,如有侵权请联系删除。曹工:13360062521
3/181
注:本文档只是用于个人使用,并非官方翻译,本人不承担任何责任。并且翻译内容来自于网络翻译存在与原文较大
的差异,请结合官方原文档使用
4.6.3 ADC 选择器和 ADC 缩放器,带失调 校正 。
. . . . . . . . . . . . . . . . . . . . . . 32
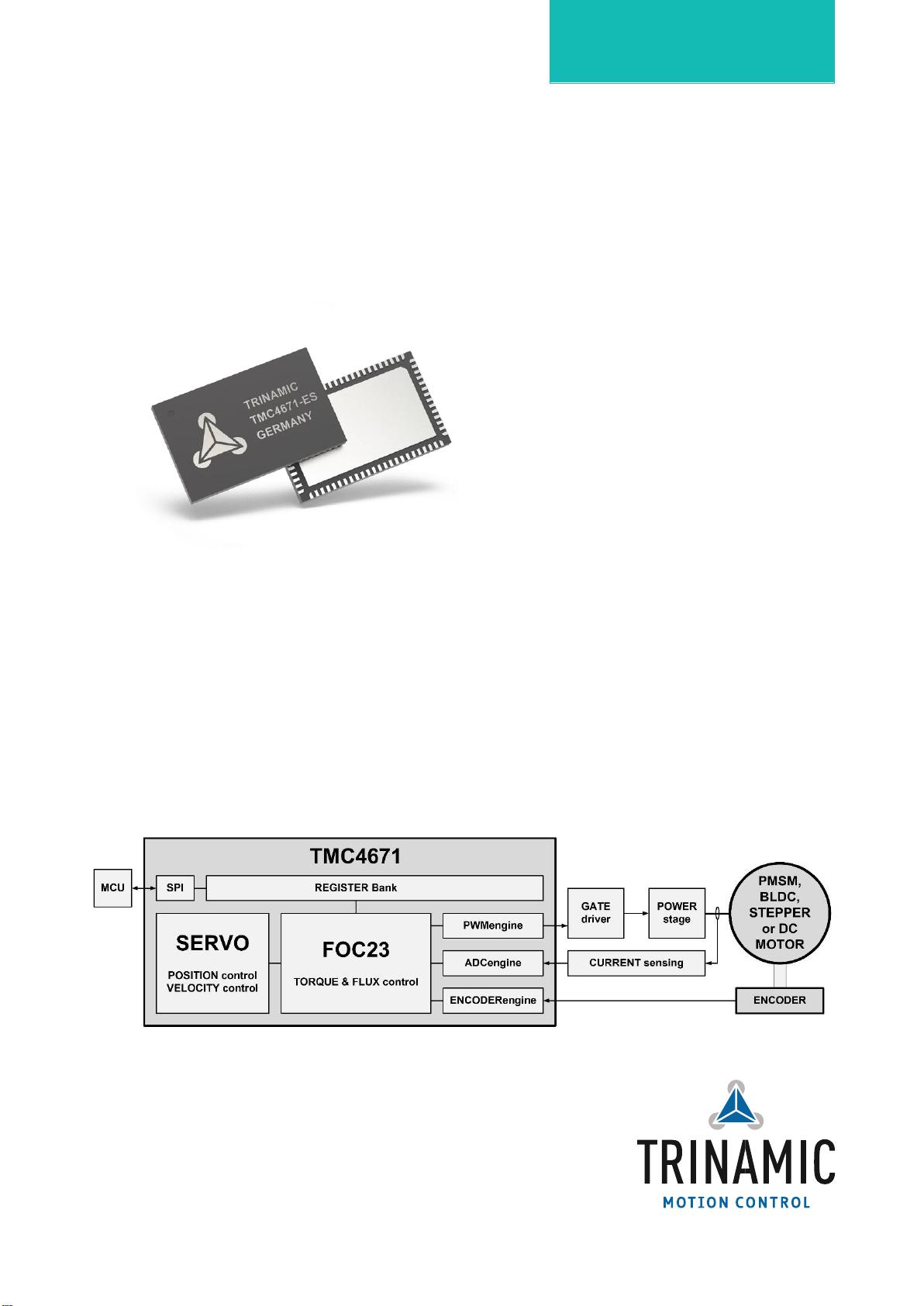
4.7 编码器引擎
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.7.1开环编码器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
4.7.2增量式 ABN 编码器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
4.7.3辅助增量 ABN 编码器。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.7.4数字霍尔传感器接口,可选配临时位置插值。 . . . . . . .38
4.7.5数字霍尔传感器 - 临时位置插值。 . . . . . . . . . . . . . . . . . . . . 37
4.7.6数字霍尔传感器 - 屏蔽和滤波 。 . . . . . . . . . . . . . . . . . . . . . . . . .37
4.7.7数字霍尔传感器与增量编码器。 . . . . . . . . . . . . . . . . . 37
4.7.8模拟霍尔和模拟编码器接口(0° 90° 或 0° 120° 240° 的 SinCos)。
. . . . .38
4.7.9模拟位置解码器(0°90°或 0°120°240°的正余)。 . . . . . . . . . . . . . . . .39
4.7.10 编码器初始化支持 。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
4.7.11 速度测量。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
4.7.12 参考交换机 。. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
FOC23 4.8 引擎
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.8.1 PI 控制器。. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
4.8.2PI 控制器计算 - 经典结构。 . . . . . . . . . . . . . . . . . . . . . . . . 42
4.8.3PI 控制器计算 - 高级结构。 . . . . . . . . . . . . . . . . . . . . . .42
4.8.4PI 控制器 - 削波 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
4.8.5PI Flux & PI Torque Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
4.8.6PI 速度控制器 .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
4.8.7P 位置控制器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
4.8.8内部 FOC 控制回路 - 磁通量和 扭矩 。 . . . . . . . . . . . . . . . . . . . . . . . . . . .45
4.8.9FOC 变换和 PI(D)用于控制通量和 扭矩 。 . . . . . . . . . . . . . . . 45
4.8.10 运动模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
4.8.11 制动斩波器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
4.9 过滤和前馈控制 。
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.9.1双二阶 滤波器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.9.2标准速度滤波器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
4.9.3前馈控制结构。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
4.10 PWM 发动机 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.10.1 PWM 极性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
4.10.2 PWM 频率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
4.10.3 PWM 分辨率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
4.10.4 PWM 模式 .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
4.10.5 先决后合(BBM)。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
4.10.6 空间矢量 PWM (SVPWM). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
安全功能 54 6寄存器图 56 7 固定5 137
5.1看门狗
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.1注册地图概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55