2007年全国研究生数学建模竞赛优秀论文选-论文 - 副本.pdf
版权申诉
144 浏览量
2024-03-18
14:14:16
上传
评论
收藏 548KB PDF 举报

1
一、问题重述
自 1959 年美国的英格伯格和德沃尔制造出世界上第一台工业机器人“尤尼
梅特”开始,近半个世纪以来,机器人的研制和应用以惊人的速度发展并取得长
足的进步。当今世界,机器人的应用领域已十分广泛,包括工业生产、海空探索、
医疗康复和军事活动等,此外,机器人已逐渐在医院、家庭和一些服务行业获得
应用。从生产车间中的焊接机械手,到水下自治式机器人,从娱乐性的拳击机器
人,到伊拉克战场上的无人驾驶机,机器人已经与我们的日常生活息息相关。
机器人通常分为关节式机器人(或称机械臂、机械手、机器人操作臂、工业
机器人等)和移动式机器人。一般来说,前者具有更多的自由度,而后者的作业
范围则更大一些。
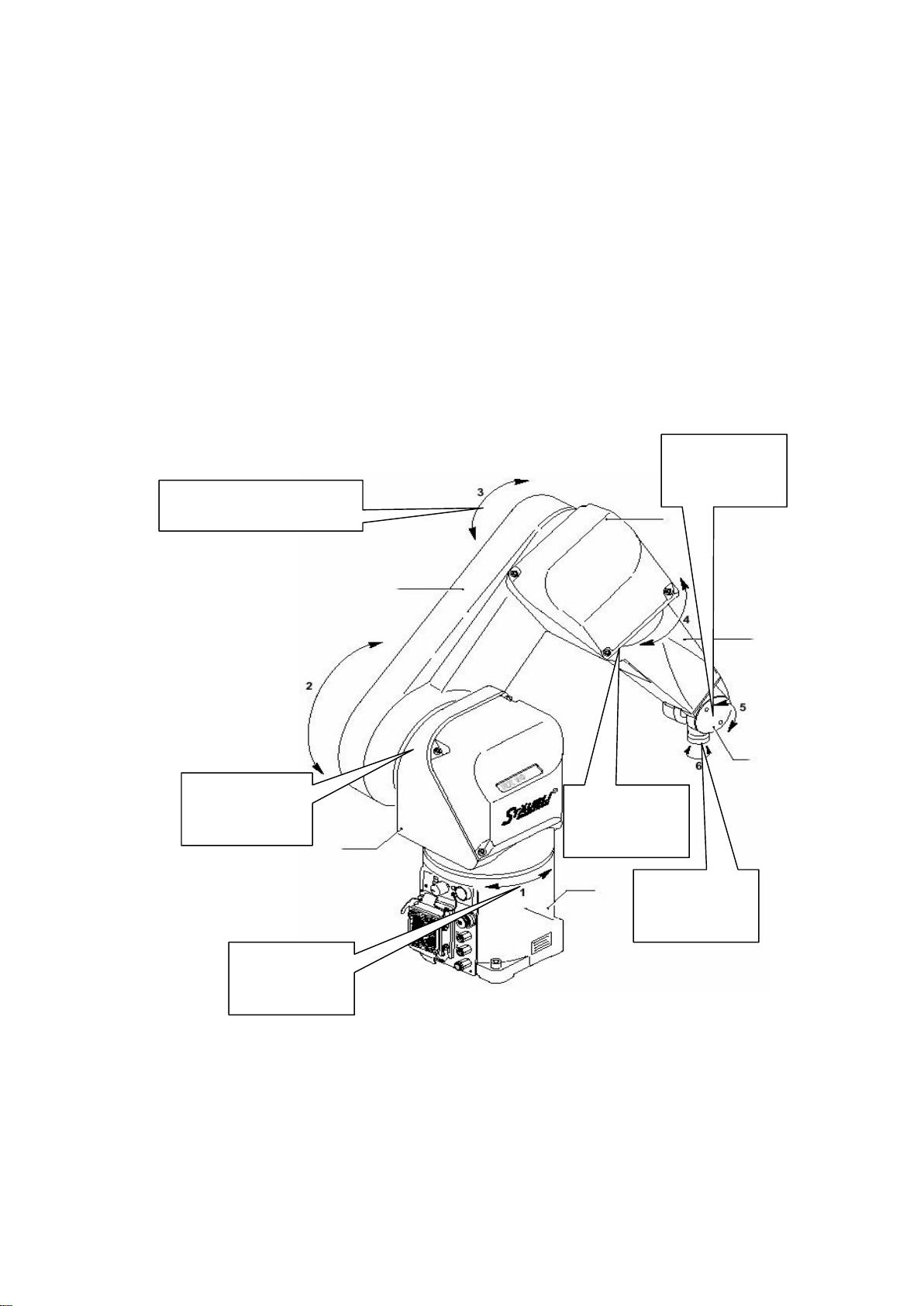
以某型号机器人为例,其示意图见图 1:
图1 机器人结构图
这种机器人一共有 6 个自由度,分别由六个旋转轴(关节)实现,使机器人的末
端可以灵活地在三维空间中运动。为了便于分析和计算,我们对机器人结构进行
第一个自由度
± 180度
第二个自由度
± 125度
第三个自由度
± 138度
第四个自由度
± 270度
第五个自由度
-133.5 ~120度
第六个自由度
± 270度




剩余28页未读,继续阅读
资源评论













