2007年全国研究生数学建模竞赛优秀论文选-机械臂运动路径设计问题1 - 副本.pdf
版权申诉
147 浏览量
2024-03-18
14:14:14
上传
评论
收藏 405KB PDF 举报

1
机械臂运动路径设计问题
1.问题的简述
机器人最主要的操作机构是各种形态的机械臂,机械臂的动作形态是是由三种不同的单位动作
——旋转、回转、伸缩组合而成的。旋转或回转是指机械臂产生相对转动,两者的不同仅在于转动
部件的轴线与转动轴线是否同轴
[1]
。旋转如笔帽的转动,回转如摇柄的转动,伸缩指机械臂产生直
线运动,引进伸缩动作,运动范围可以得到扩大。机器人机械手具有的独立的单位动作组合数称之
为自由度。一个物体在三维空间中的位置和姿态分别需要三个独立的坐标才能得到确定。所以,能
使手爪达到任意空间位置并具有任意姿态的机械手最少需要六个自由度。自由度是表达机器人通用
性、灵活性的主要指标,自由度越多,机械臂越灵活,可达的空间更广泛。当然自由度越多,机械
结构越复杂,从而控制也越困难。
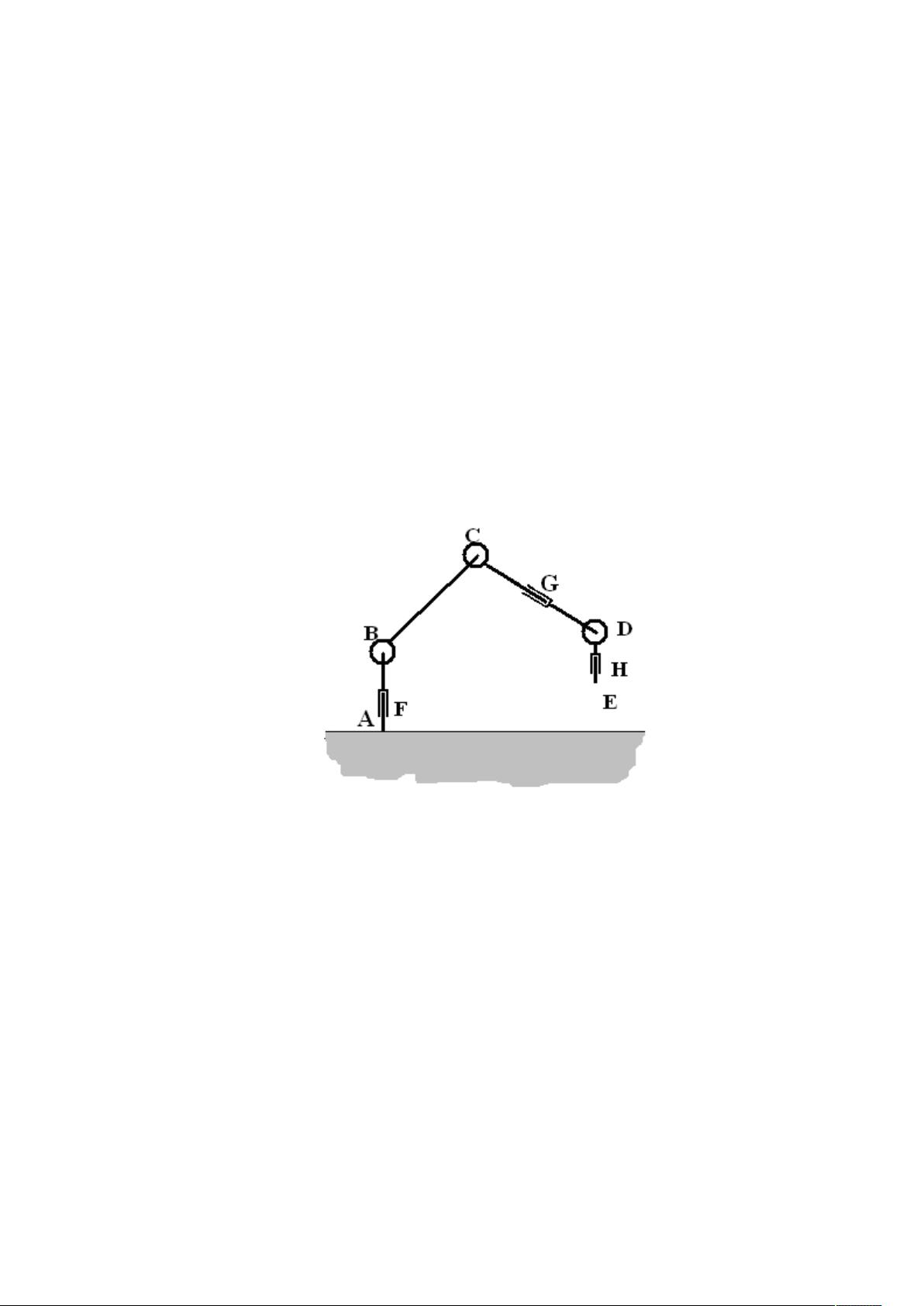
本文所研究的六自由度的机器臂的简化图如图(1):
图(1)
自由度一、四、六,对应于图中的 F,G,H 点为旋转关节,自由度二、三、五,对应
的图中的 B,C,D 点为回转关节。每一个关节对应一个角度
i
,这个角度表示前一个连杆方
向到后一个连杆方向转角(对于 B,C,D),连杆方向为 AB
、
BC
、
CD
、
DE
,
或者相对于初
始位置的转角(对于 F,G,H),假设机器人的初始位置是在一个平面上的(y-z 平面)。
为了使机器人运动得更加灵活,允许关节的转角超过 360°。
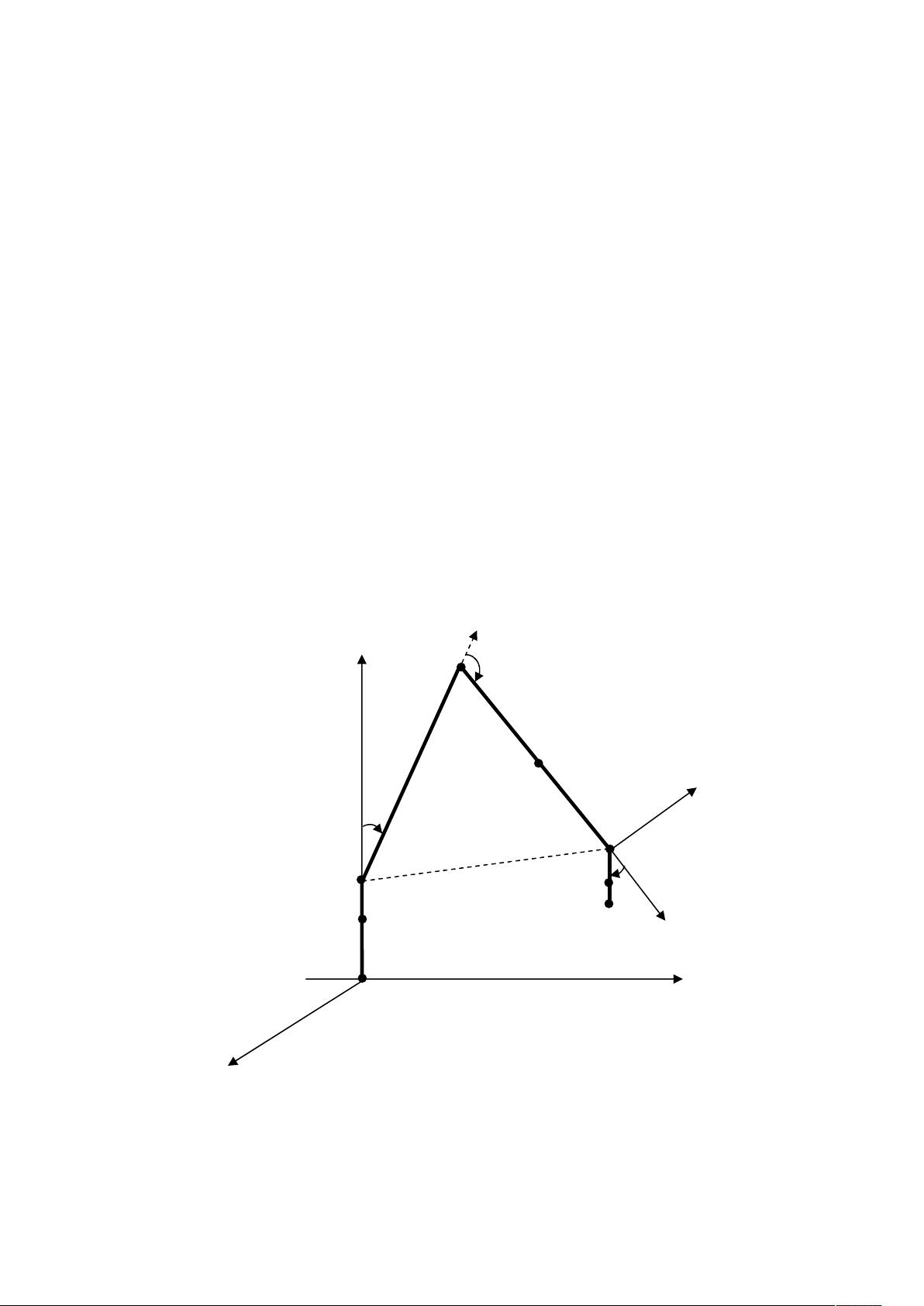
机器人关于六个自由度的每一个组合
),,,,,(
654321
,表示机械臂的一个姿态,显
然每个姿态确定顶端指尖的空间位置 X:
Xf
)(
。假定机器人控制系统只能够接收改变各个关
节的姿态的关于连杆角度的增量指令(机器指令)
),,,,,(
654321
P
,使
得指尖(图 2 中的 E 点)移动到空间点 X′,通过一系列的指令序列
n
PPPP ,,,,
321
可以将指尖依


剩余21页未读,继续阅读
资源评论













