
第1章 概述
机械手是模仿人手的部分动作,按给定程序、轨迹、和要求实现自动抓取,搬运
或操作动作的自动化机械装置。在工业中应用的机械手称为“工业机械手”。
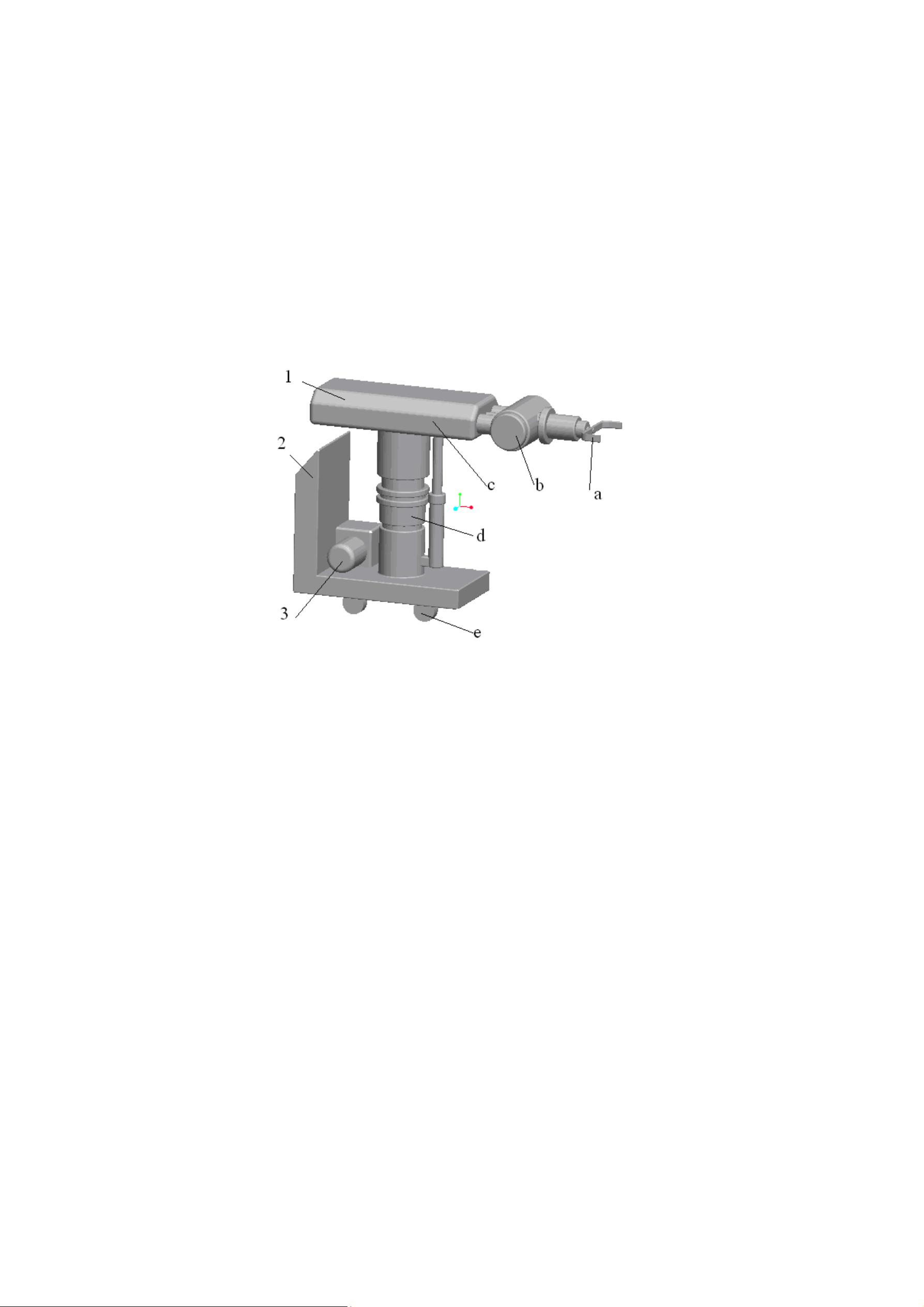
工业机械手由执行系统、驱动系统和控制系统组成。执行系统又可分为抓取,送
放和机身三部分,如图 1.1 所示
1-执行系统 2-控制系统 3-驱动系统
a-手爪 b-手腕 c-手臂 d-机身 e-行走装置
图
1.1 机械手的组成
1.1 执行系统
执行系统是直接握持物件实现所需的各种运动的机械部分,它包括以下机构
(1)抓取机构 抓取机构又称手部或手爪,是机械手直接与被抓取物件接触并
施加约束和加紧力的部分。
(2)送放机构 送放机构是执行系统中将被抓取物件送放到目的地的机械部分。
它主要由手臂、手腕、行走装置等部分组成。
手臂是用来支撑腕部和手部并改变被送放物件的空间位置的。它是机械手的主要
运动部件。
手腕主要是用来调整和改变被送放物件的方位,并连接手臂和手指。
行走装置的主要作用是扩大机械手的送放范围,以适应远距离操作的需要。
(3)机身 机身是机械手中用来支撑送放机构的部件,也是安装驱动系统,控
制系统的基础部件。
1.2 驱动系统
1


剩余35页未读,继续阅读
资源评论


G11176593
- 粉丝: 6869
- 资源: 3万+









最新资源
- 基于AEDA的数据增强技术的中文文本分类+python项目源码+文档说明
- 源支付5.1.7前端+后台+云端协议2.0
- 镜像资源centos7
- python《基于Multi-Sample Dropout的文本分类》+项目源码+文档说明
- C#MVC4通用企业门户网站源码数据库 SQL2008源码类型 WebForm
- python《基于ChineseBERT的中文文本纠错(监督学习模型)》+项目源码+文档说明
- 配置深度学习环境,里面有GPU和CPU的环境下的讲解!
- windows下C++动态库的封装和调用全部源码和工程
- 基于Huggingface的医疗领域命名实体识别+python项目源码+文档说明
- 三、计算机视觉-03LeNet5及手势识别案例《手势数据集》
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


