一种基于点云匹配的激光雷达/IMU联合标定方法
版权申诉
167 浏览量
2020-10-15
20:15:34
上传
评论 6
收藏 551KB PDF 举报

一种基于点云匹配的激光雷达一种基于点云匹配的激光雷达/IMU联合标定方法联合标定方法
针对车载激光雷达和惯性测量单元(Inertial Measurement Unit,IMU)的坐标系标定问题,设计了一种使用角反
射器作标志物的标定方法。首先通过区域分割、地面滤除和标志点提取的预处理方法来提取标志点;然后借鉴
3D点云匹配的方法,将坐标系联合标定转化为点云匹配问题,使用迭代最近邻点(Iterative Closest Point,ICP)
算法求得两坐标系的坐标转换矩阵。最后,将标定结果与基于最小二乘法的标定结果进行对比,结果表明使用
3D点云匹配的标定方法是可行的。
0 引言引言
当今导航定位领域,使用惯性导航系统(Inertial Navigation System,INS)+里程计(Odometry,OD)+高程计的组合定位方式
进行定位是主流的自主定位手段,但是该系统本身存在的误差会随着时间不断发散,需要靠其他传感器来进行辅助定位。三维
点云激光雷达定位作为一个新兴的手段,具有不受光线影响、分辨率高、测量距离远的优点。激光雷达和惯性导航进行组合的
定位方式也是当今实现无人驾驶的主流技术途径之一。为了满足该系统的定位精度,传感器之间的参数标定至关重要,参数标
定精度直接影响融合定位结果。
最初,激光雷达主要利用外部的经纬仪和测距仪直接进行轮廓测量
[1]
,以此得到标定参数,但是这种方法过于繁琐且精度较
低。目前已经提出了多种针对激光雷达位姿的标定方法。程金龙
[2]
采用三面靶标的激光雷达外参数标定的方法,使用随机采样
一致性算法完成了平面分割和同名向量的提取,最后解出标定参数;韩正勇
[3]
提出了一种可以在采样帧数比较少的情况下获得
较高精度的参数矩阵的方法,该方法采用棋盘面对应性的性质,将坐标系标定问题转换为三维空间中旋转和缩放矩阵的求解问
题;韩栋斌
[4]
提出了一种在非理想参数初值的条件下依然可以获得较好标定结果的方法,该方法采用多对点云同时匹配迭代生
成外参数来进行参数解算。
最小二乘法作为处理空间坐标组合转换的经典方法之一,被广泛应用于多种传感器的系统坐标标定
[5-8]
。针对最小二乘法标
定的改进也在不断进行
[9]
。赵立峰
[10]
将整体最小二乘法引入了坐标转换中,提出了一种迭代算法,降低低精度点的影响;杨
仕平
[11]
提出在标志点数目在4个及以上,且在两套坐标系下均存在随机误差的情况下,采用多元整体最小二乘法进行解算,提
高算法精度。
随着即时定位与地图构建(Simultaneous Localization and Mapping,SLAM)技术的发展,基于3D点云匹配技术的点云拼接
方法日趋成熟,3D点云匹配的思路可以运用到坐标系标定的问题中,通过点云匹配方法求解两个坐标系的坐标转换矩阵。常
用的3D点云匹配方法有ICP、正态分布变换(Normal Distributions Transform,NDT)等算法。点云配准方法有很多种,目前比
较普遍的处理方式是基于点-点匹配的迭代最近点方法(ICP)、进一步提取特征进行特征匹配的改进ICP算法以及采用概率模型
描述点云正态分布的NDT算法
[12]
。原始的ICP算法由Besl等提出
[13]
,核心思想为计算使得匹配点对欧氏距离和最小的坐标变
换矩阵。针对常规ICP算法的缺陷,国内外的学者也提出了大量的改进算法,如MINGUEZ J
[14]
提出了一种新的距离尺度函
数,同时考虑到平移和选转,解决了旋转误差的问题。NDT算法是BIBER P
[15]
提出的,这种算法完全基于概率模型进行匹
配。
本文中将提出一种基于点云匹配思想的车载激光雷达/IMU联合标定的方法,并与基于最小二乘法的标定结果进行对比。
1 基本原理基本原理
激光雷达与IMU之间存在安装误差角和位置误差,因此两个传感器测量得到的同一组标志点的三维坐标不同,可以通过对应
坐标点的关系来计算得到坐标系之间的转换矩阵,完成激光雷达/IMU坐标系的联合标定。
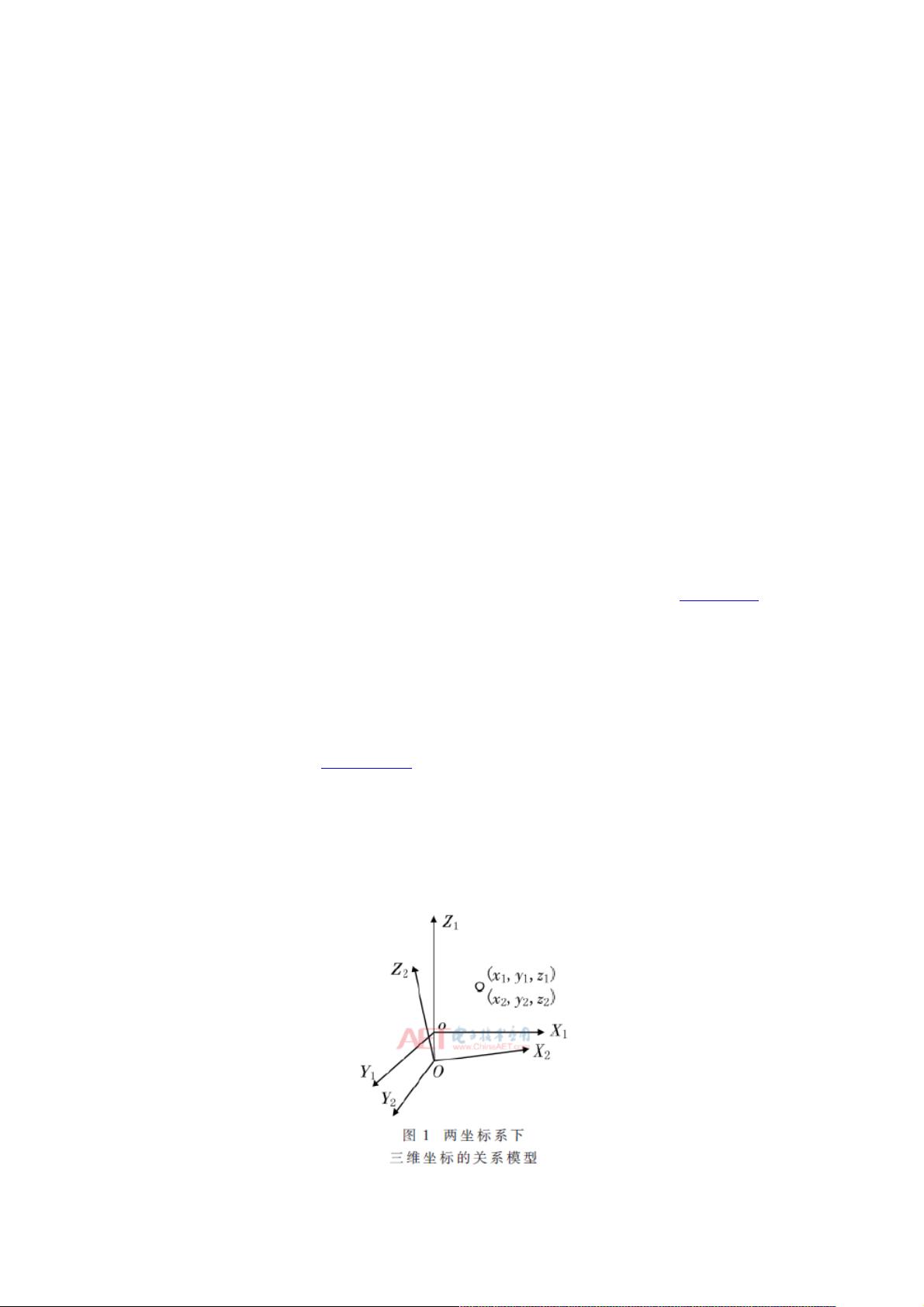
两坐标系下三维坐标的关系模型如图1所示。
(oX
1
Y
1
Z
1
)为坐标系M,(OX
2
Y
2
Z
2
)为坐标系N,标志点在两个坐标系之间的坐标分别为(x
1
,y
1
,z
1
)、(x
2
,y
2
,z
2
),两者之
间的坐标变换矩阵为T
3D
为4×4矩阵,由旋转矩阵R和平移矩阵T组成。






评论0
最新资源