现代控制理论是自动控制领域的一门核心课程,它主要研究如何设计和分析复杂系统的控制器,以达到预定的性能指标。这门学科的发展极大地推动了自动化、航空航天、通信、机器人等领域的科技进步。《现代控制理论(第2版)》是一本权威的教材,深入浅出地介绍了这一领域的基本概念、理论和方法。
习题解答是学习过程中至关重要的部分,它能够帮助学生巩固所学知识,提高理解和应用能力。"现代控制理论(第2版) 习题参考答案"文档提供了一个全面的答案集,涵盖了教材中的各个章节,包括线性系统理论、状态空间模型、可控性与可观测性、李雅普诺夫稳定性分析、根轨迹法、频域分析、最优控制以及自适应控制等多个关键主题。
1. **线性系统理论**:这部分会介绍线性时不变系统的基本性质,如传递函数、频率响应、零极点配置等,习题解答将帮助学生理解如何通过这些工具分析系统的动态特性。
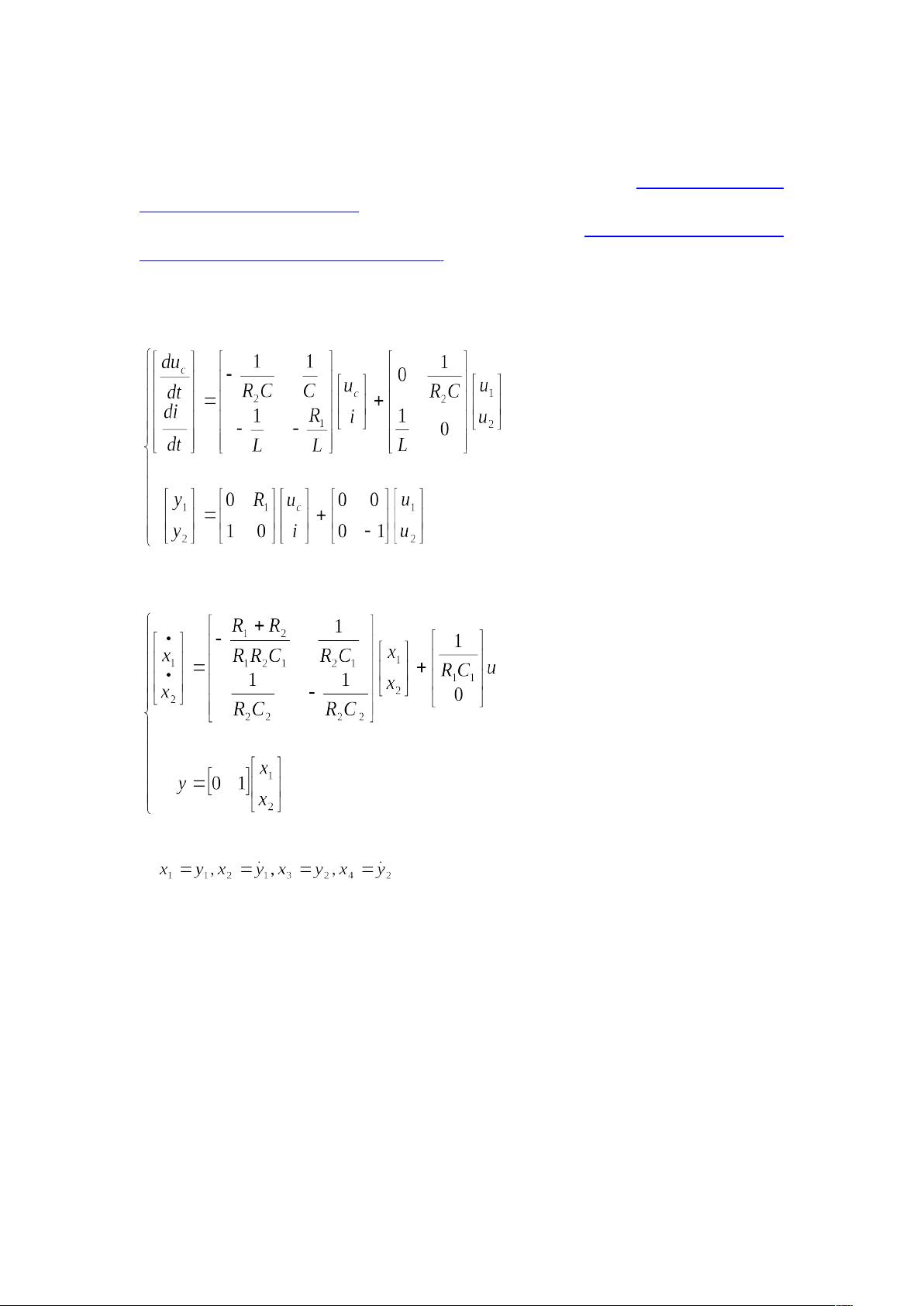
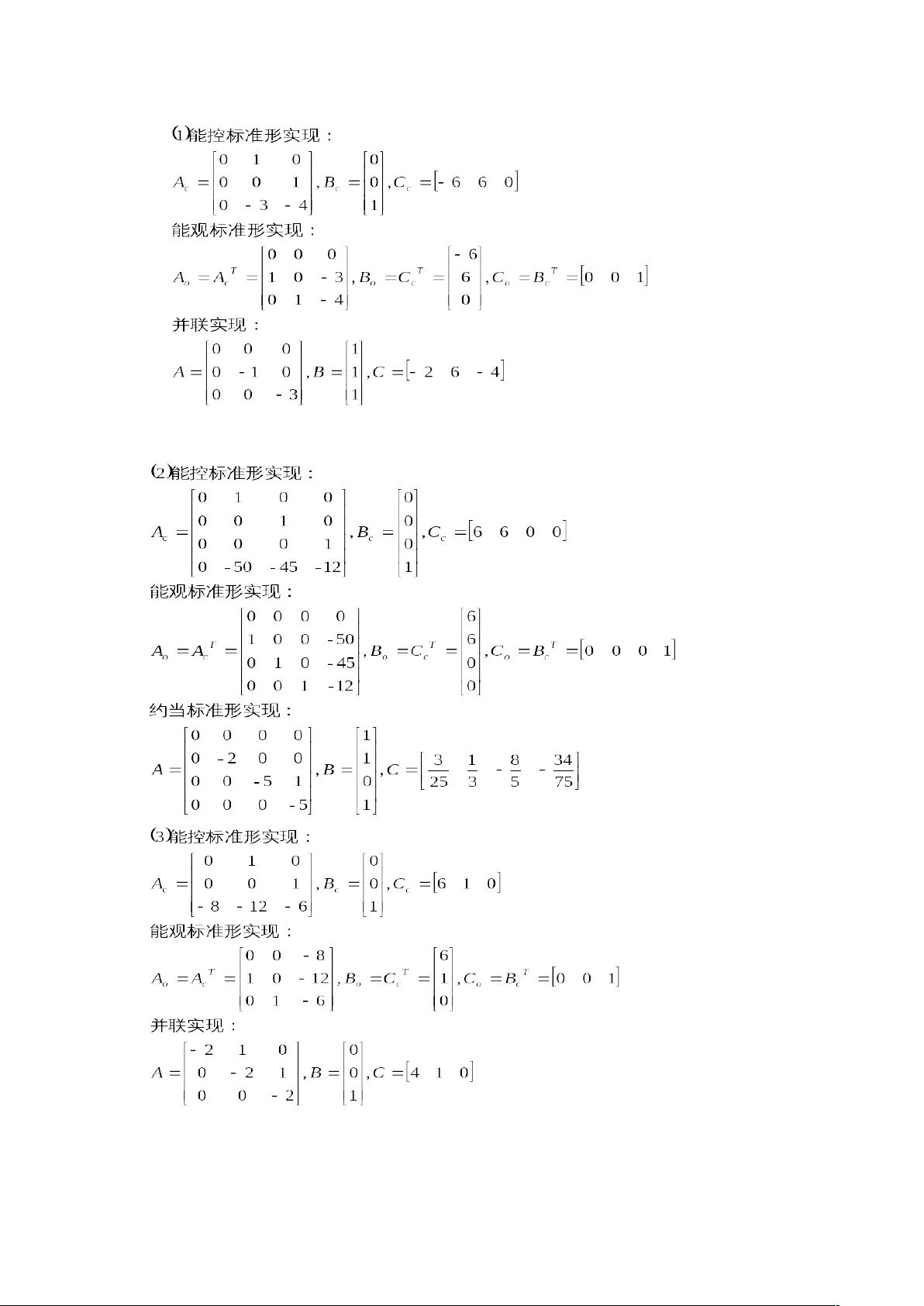
2. **状态空间模型**:状态空间模型是现代控制理论的基础,它用一组状态变量来描述系统的动态行为。习题解答会涉及如何建立状态方程,进行系统转化,以及如何求解线性常微分方程组。
3. **可控性与可观测性**:这两个概念是分析和设计控制器的重要依据。习题会探讨如何判断系统的可控性和可观测性,以及它们对系统性能的影响。
4. **李雅普诺夫稳定性分析**:利用李雅普诺夫函数可以评估系统的稳定性,习题解答将展示如何构造和证明李雅普诺夫函数,从而分析系统的渐近稳定性和局部稳定性。
5. **根轨迹法**:根轨迹法是一种直观的系统分析方法,用于研究参数变化对系统稳定性的影响。习题会涉及绘制根轨迹,理解增益和相角裕度。
6. **频域分析**:通过波特图和奈奎斯特定理,学生可以了解系统的频率响应特性,习题解答会指导如何计算幅频特性和相频特性,以及如何根据这些特性选择控制器。
7. **最优控制**:最优控制涉及到在满足一定约束条件下,寻找使性能指标最小化的控制策略。习题将涉及拉格朗日乘子法、动态规划等方法的应用。
8. **自适应控制**:自适应控制系统能自动调整参数以适应环境或系统参数的变化,习题解答将涵盖自适应律的设计和自适应控制算法的实现。
通过详尽的习题解答,学生不仅可以检验自己的理解,还能深入理解现代控制理论的各种工具和方法,为实际工程问题的解决打下坚实基础。对于自学或教学来说,这是一份非常有价值的参考资料。