# youbot-Pick-and-Place-with-PI-Control
### Conducted as the Capstone Project of Modern Robotics: Mechanics, Planning, and Control Specialization by Northwestern University, offered on Coursera. (Uses Modern Robotics Library which can be found here, on Github)
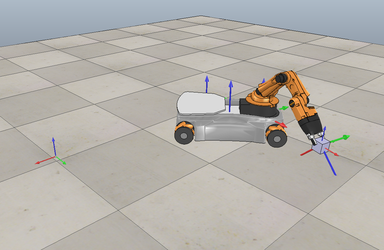
The project aims to make the mobile manipulator youBot pick a cube from an initial configuration and tranport it to a desired location before dropping it off.
The program uses 3 separate functions to achieve this. TrajectoryGenerator first creates a reference trajectory for the end-effector of the youBot. After an initial configuration
is selected, FeedbackControl function calculates the error between the actual and the reference configuration and finds the control vector to be commanded. Then the NextState
function calculates the new configuration for the robot in order to move the robot towards the objective.
Controller Information:
The controller used to move the robot is Feedforward PI Controller. The controller is tested with different Kp and Ki gains to see the error response.
Feedforward PI with Kp = 100, Ki = 210

Feedforward PI with Kp = 62, Ki = 19

With the 100 and 210 being Kp and Ki gains, respectively, an example response to a large initial configuration error looks like this:

With gains which are not tuned very well, system may behave oscillatory or even unstable. An oscillatory response looks like this:

An example run of the program looks like this on simulation environment (Coppelia Sim):

毕业设计&课设-该项目旨在使移动机械手youBot从初始配置中拾取立方体并将其运输到所需的位置….zip

需积分: 1 171 浏览量
2024-01-08
22:56:40
上传
评论
收藏 28.69MB ZIP 举报
 毕业设计&课设-该项目旨在使移动机械手youBot从初始配置中拾取立方体并将其运输到所需的位置….zip (24个子文件)
毕业设计&课设-该项目旨在使移动机械手youBot从初始配置中拾取立方体并将其运输到所需的位置….zip (24个子文件)  matlab_code Results
matlab_code Results  eheee.gif 957KB newTask
eheee.gif 957KB newTask  newTask.csv 838KB
newTask.csv 838KB ReadME.txt 228B Output log.txt 89B newTask.gif 4.71MB
ReadME.txt 228B Output log.txt 89B newTask.gif 4.71MB Error Plot.png 19KB
Error Plot.png 19KB newTask.mp4 7.33MB ehee.gif 1.72MB best ReadME.txt 181B Error Plot.png 24KB Output Log.txt 89B best.mp4 8.2MB best.csv 870KB overshoot ReadME.txt 181B overshoot.csv 869KB overshoot.mp4 7.7MB Error Plot.png 24KB Output Log.txt 89B Code TrajectoryGeneratorr.m 3KB Main.m 4KB FeedbackControl.m 1KB NextStatey.m 1KB Yeni Metin Belgesi.txt 161B README.md 2KB
newTask.mp4 7.33MB ehee.gif 1.72MB best ReadME.txt 181B Error Plot.png 24KB Output Log.txt 89B best.mp4 8.2MB best.csv 870KB overshoot ReadME.txt 181B overshoot.csv 869KB overshoot.mp4 7.7MB Error Plot.png 24KB Output Log.txt 89B Code TrajectoryGeneratorr.m 3KB Main.m 4KB FeedbackControl.m 1KB NextStatey.m 1KB Yeni Metin Belgesi.txt 161B README.md 2KB资源评论



白话机器学习
- 粉丝: 8928
- 资源: 7681









最新资源
- 欧阳雨彤202330813009.py
- 基于 Yolov5 的自动贴标IMG,以及许多其他有用的工具
- 基于STM32F103C8T6、LCD1602、AD5206(I2C接口)6路数字电位器的proteus仿真应用设计
- 021315100-2405220913.awb
- 语音分帧与加窗基于MATLAB
- 二层独栋别墅砖混结构D027-两层-10.40&10.30米-施工图.dwg
- 帆软跑马灯制作,附件有制作好的效果
- 本户型为2层独栋别墅D026-两层-13.14&12.84米-施工图.dwg
- 双层别墅图纸有施工图D022-两层-08.70&10.80米-施工图.dwg
- 基于Android的交通事故全责图解设计源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


