
工程实践与科技创新 IV-E
Lecture 1: 绪论
授课老师: 张晗、王景川 2023 年春季
1 ROS 简介
1.1 机器人操作系统 ROS
1. ROS 是机器人操作系统(Robot Operating System)的英文缩写,是一个适用于机器人的开
源的元操作系统。
2. 它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消
息传递,以及包管理。它也提供用于获取、编译、编写和跨计算机运行代码所需的工具和库
函数。
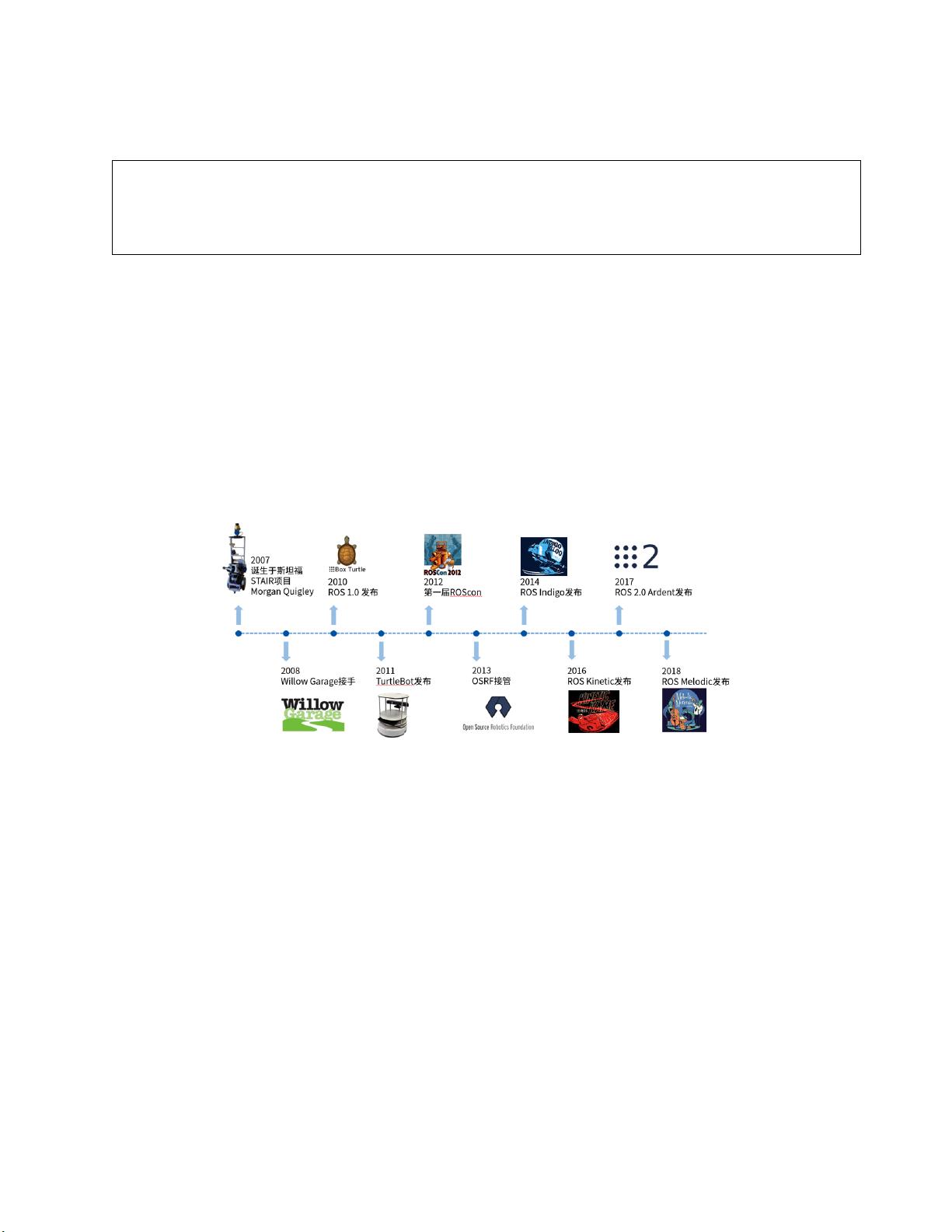
Figure 1: ROS 系统发展进程
1.2 ROS 的架构
1. ROS 就是一套通信机制、一套开发工具、一系列应用工具加一个庞大的生态系统组成的集合,
目标是提高机器人研发中的软件复用率。针对这样的目标,如图 Fig. 2,ROS 有五大特点。
2. ROS 的组成有以下四大部分,即通讯机制 + 开发工具 + 应用功能 + 生态系统。
3. ROS 提供了很多开发工具,目的是提高机器人开发效率。第一个是命令行工具,可以直接在
terminal 内进行操作;还有 TF 工具,可以帮助进行坐标变换;还有 QT 工具箱,提供很多
可视化的工具;RVIZ 是一个三维可视化工具,可以显示机器人的全部数据;Gazebo 是一个
三维仿真平台,可以进行机器人仿真。
4. 如图 Fig. 4,ROS 在生态层面讲就是这么几个重要的资源。发行版指 ROS 发布的版本。软
件源中放置的是可直接安装的功能包。ROS Wiki 是 ROS 信息记录最完善的网站。邮件列表
1: 绪论-1


剩余10页未读,继续阅读
资源评论













