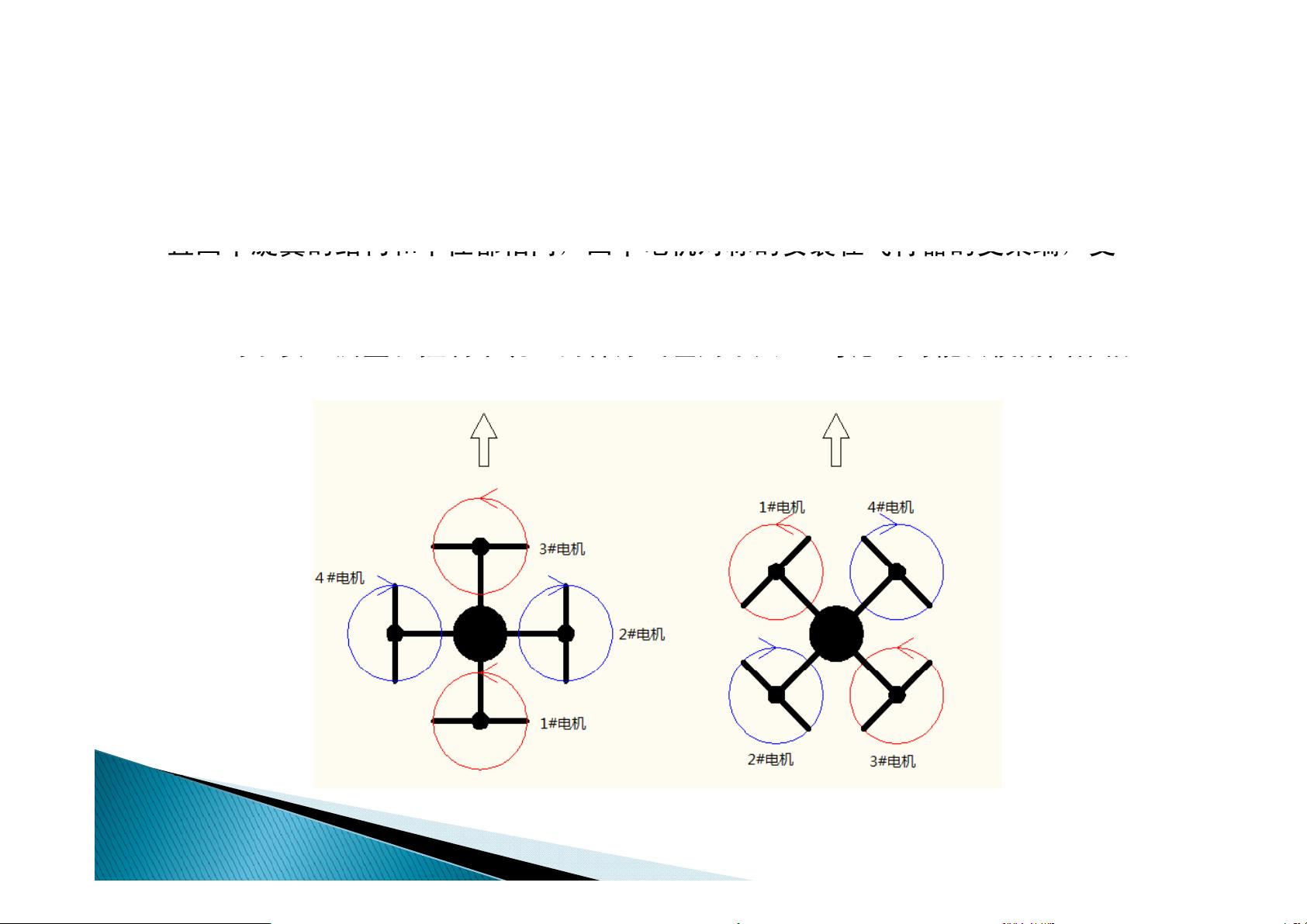
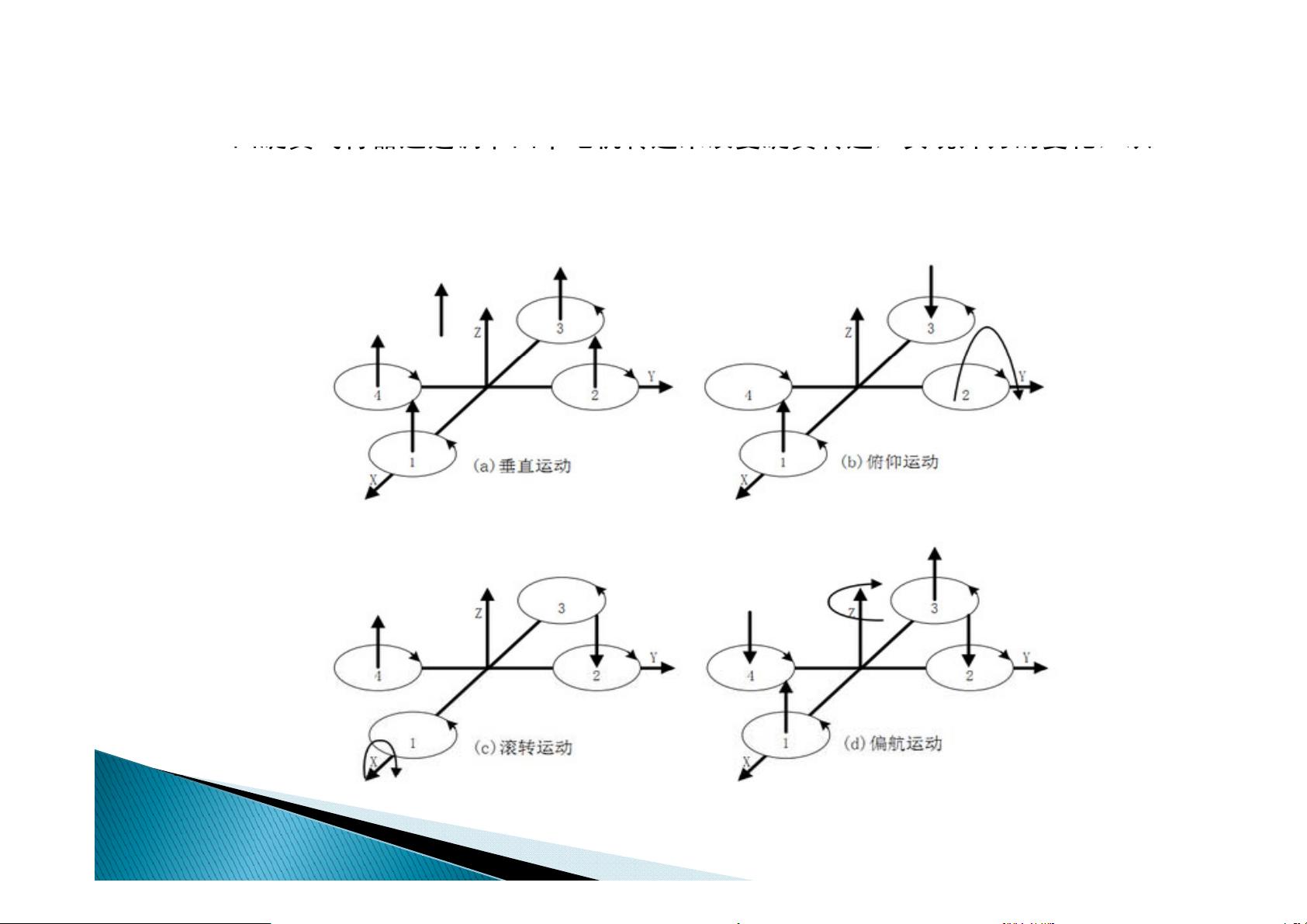
微型四旋翼飞行器DIY入门所涉及的知识点十分丰富,涵盖了从基础的硬件选型到复杂的软件编程。以下将详细介绍这些知识内容。 微型四旋翼飞行器的外形设计至关重要,它决定了飞行器的空气动力学特性和结构强度。传统四旋翼飞行器的四个旋翼呈十字布局,分布在一个水平面上,这样可以确保在飞行中保持平衡。旋翼通常要求结构和尺寸完全一致,以避免造成飞行中的偏转。飞行器的支架通常是一个轻质但坚固的材料构成的框架,用以安装电机、电池和飞控系统等关键部件。 飞行器的工作原理基于四个电机产生的动力和控制。四旋翼飞行器通过调整四个电机转速来改变旋翼的转速,进而产生不同的升力,实现对飞行器姿态和位置的精确控制。每个电机都驱动一个旋翼,而旋翼的旋转方向将直接影响飞行器的运动。例如,调整对角线上电机的转速可以实现旋转运动,调整一侧两个电机的转速则可控制飞行器的前进、后退、左转、右转等。 四旋翼飞行器通常采用“X”模式飞行,该模式下,前后两个旋翼逆时针旋转,左右两个旋翼顺时针旋转,这样使得它们产生的转矩相互抵消,维持机体平衡。飞行器的运动方向控制是通过调整不同旋翼的转速差来实现的。例如,如果要让飞行器向前运动,则需要降低一组电机的转速同时提高另一组电机的转速。 微型四旋翼飞行器的基本组成包括电机、电子调速器(电调)、旋翼、电池、机架、遥控器和飞控计算机。电机是驱动旋翼旋转的动力源,分为有刷和无刷电机两大类。有刷电机体积小,成本低,但效率较低;无刷电机效率更高,转速快,是目前主流的选用方式。电调负责调节电机的转速,对于无刷电机而言,需要配合相应的控制算法来驱动。 旋翼的选择需要与电机的特性相匹配。电池则需要提供足够高的能量密度和放电能力,以支撑飞行器的长时间运行。机架作为固定和连接各个部件的结构,其设计直接影响飞行器的性能和可靠性。遥控器用于发送控制命令,现代四旋翼飞行器多采用2.4GHz无线信号进行遥控。飞控计算机是整个飞行器的大脑,集成了微处理器和多种传感器(如陀螺仪、加速度计、地磁传感器等),通过复杂的算法和控制逻辑来确保飞行器的稳定飞行。 飞控计算机的算法通常基于捷联惯性导航系统,利用各种传感器数据实时计算出飞行器的姿态角,并通过比例积分微分(PID)控制算法来调整电机的输出功率,从而实现精确飞行。飞控系统中的无线接收模块还能够接收遥控器的指令,以便实现人工操作与自动控制之间的切换。 多旋翼飞行器的应用领域非常广泛。在农业方面,它们可以用于低空撒种和喷洒农药。在城市治安监控、森林灭火、灾难现场监控等领域,多旋翼飞行器通过搭载高清摄像头和传感器,提供了监视和信息采集的能力。此外,它们还被用于应急通讯、电力巡检、海上搜救、气象观测、航拍航测等。在专业领域,例如空中勘探、无声侦查、边境巡逻、核辐射探测以及航空探矿等领域,多旋翼飞行器也发挥着重要作用。 由于技术原因,文档中的OCR扫描文字可能存在个别识别错误或漏识别的情况,但以上知识点已经尽可能根据所给信息进行了详细且准确的阐释。对于四旋翼飞行器DIY爱好者而言,理解和掌握这些知识点是入门的重要基础,通过不断的实践和学习,逐步提高DIY的能力和水平。
剩余48页未读,继续阅读
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~