四旋翼微型飞行器设计
作者:红桃 K
0 引言
微型飞行器(Micro Air Vehicle,简称 MAV)
是 20 世纪 90 年代发展起来的一种新型飞行
器。根据美国国防高级研究计划局(DARPA)
的定义,微型飞行器的基本技术指标包括:飞
行器最大尺寸不超过 15 cm,重量 10~100 g,
有效载荷 1~18 g,续航时间 20~60 min,巡航
速度 30~60 km/h,飞行距离 1~10km,能够自
主飞行。按照飞行模式的不同,微型飞行器可
分为:固定翼微型飞行器、旋翼微型飞行器和
扑翼微型飞行器。固定翼微型飞行器飞行距离
远,巡航速度快,续航能力强,比较适合野外
区域性侦查等工作。其典型代表是美国航空环
境公司(AeroVironment)研制的 Black Widow 和
洛克希德桑德斯公司(Lockheed Sanders)研制
的 MicroStar。旋翼微型飞行器具有一个或多
个旋翼,能够垂直起降和悬停,适用于狭小空
间(如室内)或复杂近地环境中。典型代表是洛
克尼克公司(Lutronix)研制的 Kolibri 和斯坦福
大学研制的 Mesicopter。扑翼微型飞行器是一
种模仿昆虫或鸟类的新型飞行器,其主要特点
是将举升、悬停和推进功能集成于一体,具有
很强的机动性和灵活性。扑翼微型飞行器控制
方式比较复杂,目前多数机构都处于研究阶
段,离实际使用还有一定的距离。典型代表是
加利福尼亚工学院研制的 MicroBat 和斯坦福
研究中心(SRI)研制的 Mentor。国内也有多家
高校开展了微型飞行器的研究工作,如清华大
学,上海交通大学,哈尔滨理工大学,华南理
工大学等。
对于室内狭小空间的侦查任务,需要微型
飞行器具有垂直起降能力,稳定悬停能力以及
灵活的机动性。多旋翼微型飞行器是实现以上
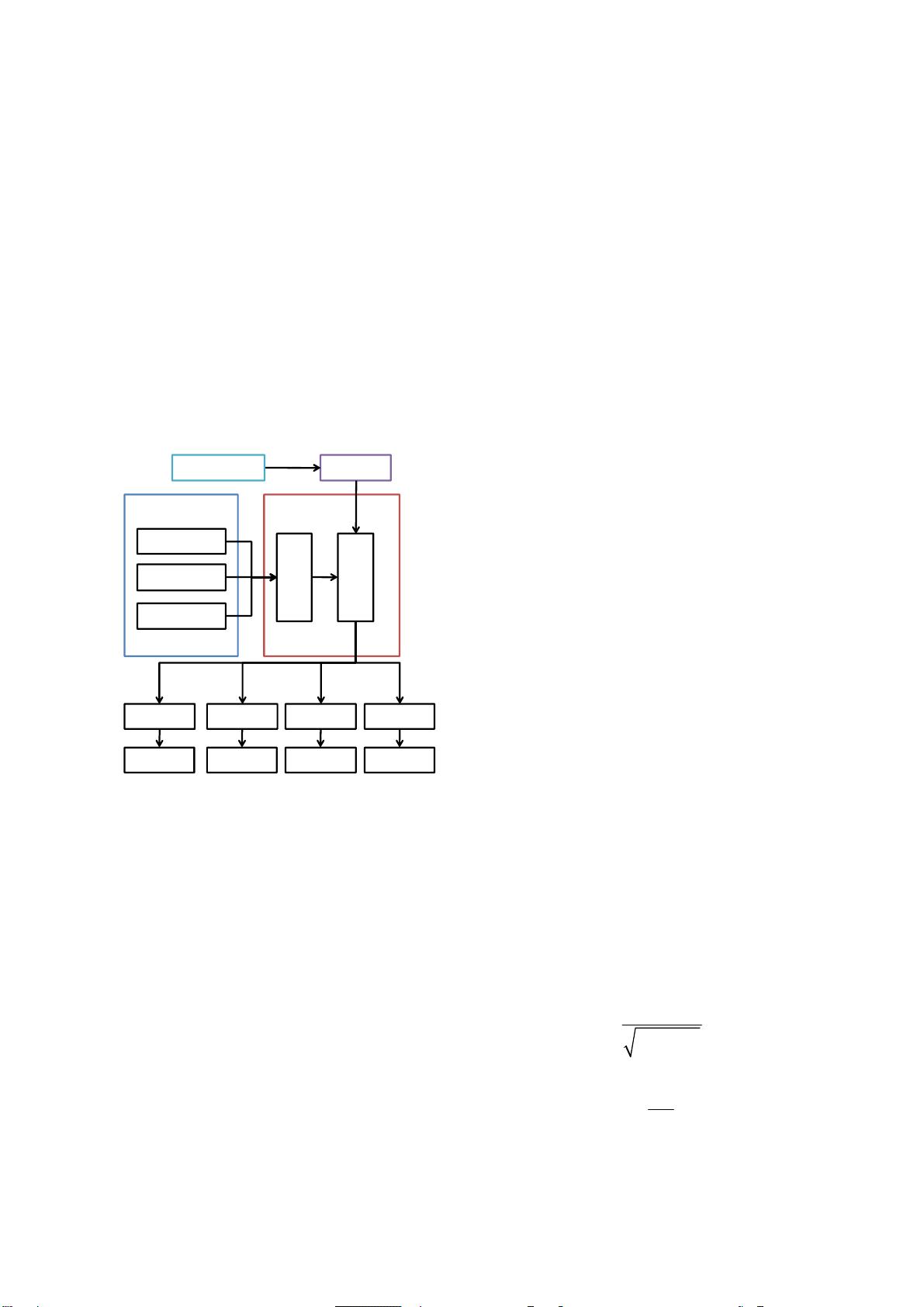
功能的理想选择。本文设计了一种微型四旋翼
飞行器,使用三轴陀螺仪,三轴加速度计和三
轴磁力计组成姿态测量系统,使用四元数算法
进行姿态解算,使用互补滤波器进行数据融合
以减小机体振动和陀螺漂移对姿态测量的影
响。该飞行器体积小,重量轻,可垂直起降和
悬停,适用于室内狭小空间的侦查任务。
1 飞行器基本工作原理
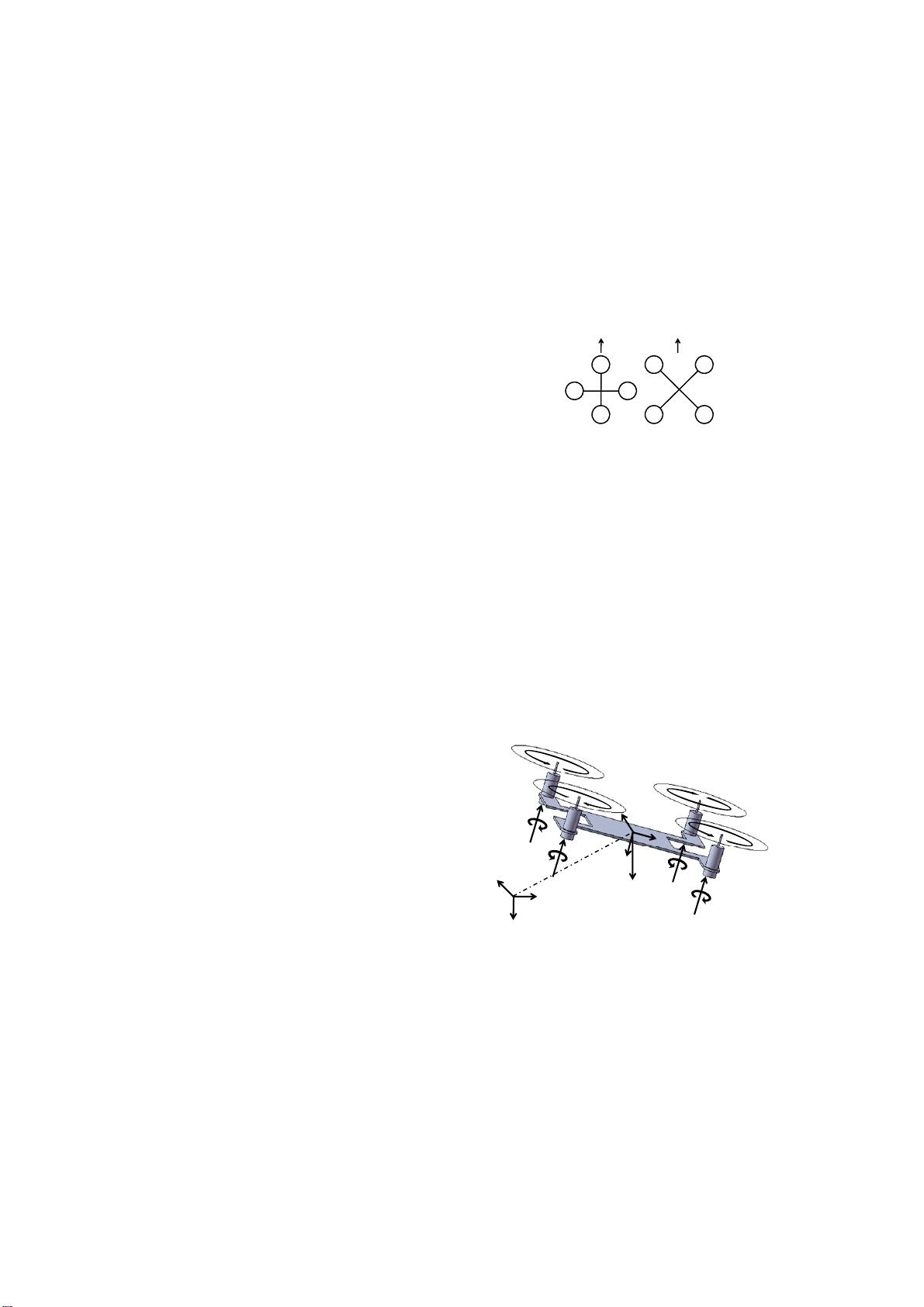
前前
十字模式 X模式
图 1 两种四旋翼飞行器模式示意图
四旋翼飞行器是一种由固连在刚性十字
交叉结构上的四个电机驱动的一种飞行器。飞
行器动作依靠四个电机的转速差进行控制,其
机械结构相对简单,可由电机直接驱动,无需
复杂的传动装置,便于微型化。四旋翼飞行器
按照旋翼布置方式可分为十字模式和 X 模式,
如图 1 所示。对于姿态测量和控制来说,两种
方式差别不大。考虑到可能会使用向前安装的
视觉传感器,为了使视线不被遮挡,本设计使
用 X 模式布置方式。
z
B
y
B
x
B
F
1
F
4
F
2
F
3
M
1
M
2
M
3
M
4
mg
x
N
y
N
z
N
电机4
电机3
电机2
电机1
图 2 四旋翼飞行器动力学模型
微型飞行器的动力学模型如 2 图所示。飞
行器载体坐标系 B,原点固连于飞行器的重心,
以坐标轴 x
B
, y
B
和 z
B
表示,分别指向飞行器的
前(横滚轴)、右(俯仰轴)和下(偏航轴)方向。选
取导航坐标系 N 为参考坐标系,以坐标轴 x
N
,
y
N
和 z
N
表示,分别指向北、东和当地垂线向下
方向。M 和 F 分别代表飞行器受到转矩和升
力。
四旋翼飞行器产生基本动作的原理为:电