哈工程哲社立项其机器人平台的开发.doc
版权申诉
78 浏览量
2021-10-12
14:24:45
上传
评论
收藏 1.07MB DOC 举报

. . . .
一种高效波动推进方式的研究与其机器人平台的开发设计说明书
海洋航行器的运动是依靠流体的反作用力实现的,当代海洋航行器的主流动力装置是螺
旋桨,螺旋桨扰动流体产生周向诱导速度和轴向诱导速度。有用功率是轴向诱导速度产生的,
相当一局部的能量引起了流体的周向转动做了无用功。
波动推进是一种高效的推进方式,设计采用一种波动实验装置测量波动鳍在不同波速,
波频以与波幅状态下产生的推力大小与推进的效率,根据实验结构绘制出效率曲线,得出最
高效率对应的波幅波长与波动速度应用于实际的航行器平台。
作品是一种波动推进装置,通过摆动杆有序的摆动形成杆组的波动,进而产生推力。推
进机理是波动鳍产生的行进波与水相互作用产生推力,其对流体的扰动小,产生的噪声低,
绿色环保;实验测得低速条件下推进效率高于螺旋桨。
联系人:徐文华 ; : ; E-mail:xwh625163.
1.研究背景与现状介绍
1.1 研制背景与意义
我们知道燃油消耗是远洋船舶的主要运营本钱之一,因此研究一种新型的高效水中推进
方式来降低能耗有十分重要的意义,同时也符合现在节能减排的大趋势。
海洋中的水生生物经过漫长的自然进化,使得它们的推进方式拥有极高的效率与灵活性。
目前广泛应用的水下航行器根本都是采用螺旋桨推进。由于在螺旋桨尾部的水流别离、漩涡
多、气泡大等原因造成明显的能量损失,其推进效率只能达到 40%;而仿生推进效率可以
达到 80%以上。仿生水下游动的高机动性,高效率,以与低噪声、对环境扰动小等优点符
合节能减排,绿色环保的社会开展需要。
本作品是在系统研究了鳍波动推进方式的根底上制作的,在满足水中航行器的各种功能
的前提下大大提高了机器鱼的推进效率,达到了节能的效果。
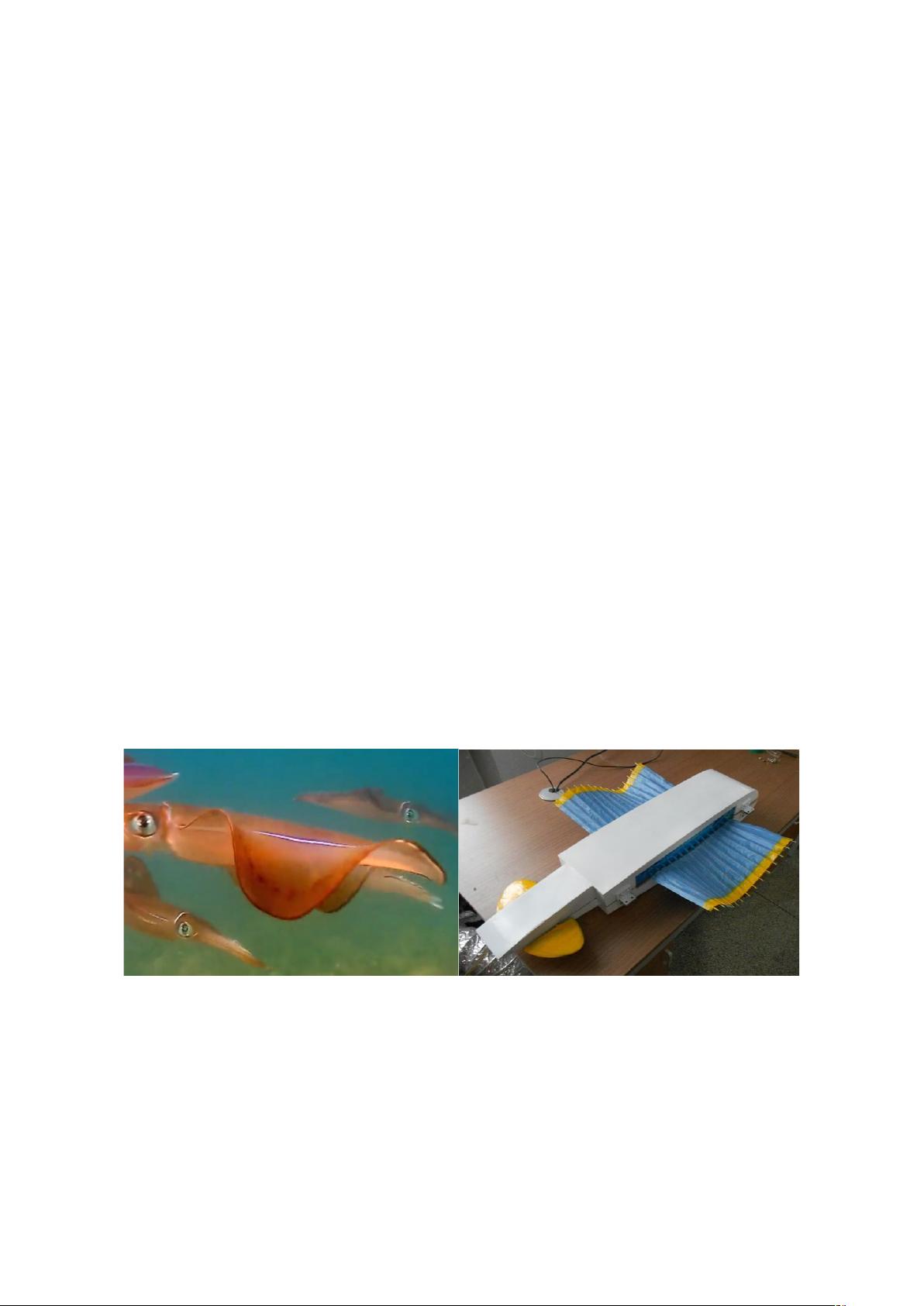
图〔1〕:鳍波动推进—乌贼 图〔2〕:鳍波动推进机器人
1.2 当前国外同类领域的研究水平
受到生物实验技术和非定常流体动力学理论的制约,MPF 推进模式的研究相对于 BCF
推进模式起步较晚。所以对于尾鳍摆动模式的研究较多,成果也较多。而鳍波动模式的研究
尚处于初级阶段。国关于鳍波动模式的研究机构较少。
目前国际上已经开发出了多种多样的柔性鳍波动推进仿生模型,在理论研究、数值计算,
实验研究等方面都有了不同程度的进展,然而柔性鳍波动推进的机理还在研究探索中,仿生
1 / 7
资源评论


yunxidzh
- 粉丝: 59
- 资源: 30万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











