

2010 Microchip Technology Inc. DS00908B_CN 第 1 页
AN908
引言
该应用笔记介绍了为 dsPIC30F 系列器件编写的矢量控
制应用程序。除简要介绍了有关控制理论的知识外,文
中所涉及内容需要读者对交流感应电机 (AC Induction
Motor,ACIM)的特性具有基本的了解。 可参阅文中提
到的参考文献,获得相关的背景知识。
软件特征
矢量控制软件具有以下特征:
• 软件采用间接磁通控制法实现交流感应电机的矢量
控制。
• 控制环周期为 50 μs,软件需要大约 9 MIPS 的
CPU 开销 (不到全部 CPU 能力的 1/3)。
• 应用程序需要占用 258 字节的数据存储空间以及
256 字节的常量存储空间。用户界面需要占用大约
8 K 字节的程序存储空间。
• 根据对存储空间的要求,该应用程序可在
dsPIC30F2010 上运行。 dsPIC30F2010 是目前
dsPIC30F 系列中体积最小、成本最低的一款器
件。
• 通过使能可选的诊断模式可在示波器上对内部程序
变量进行实时观察。 借助该特性,可方便地进行控
制环参数的调整。
矢量控制理论
背景知识
由于具有结构简单以及耐久性强的特点,因此交流感应
电机是工业和民用电机应用中的主要设备。这种电机没
有电刷和磁钢,因此具有较高的可靠性和较低的成本。
转子采用简单的钢质鼠笼结构。
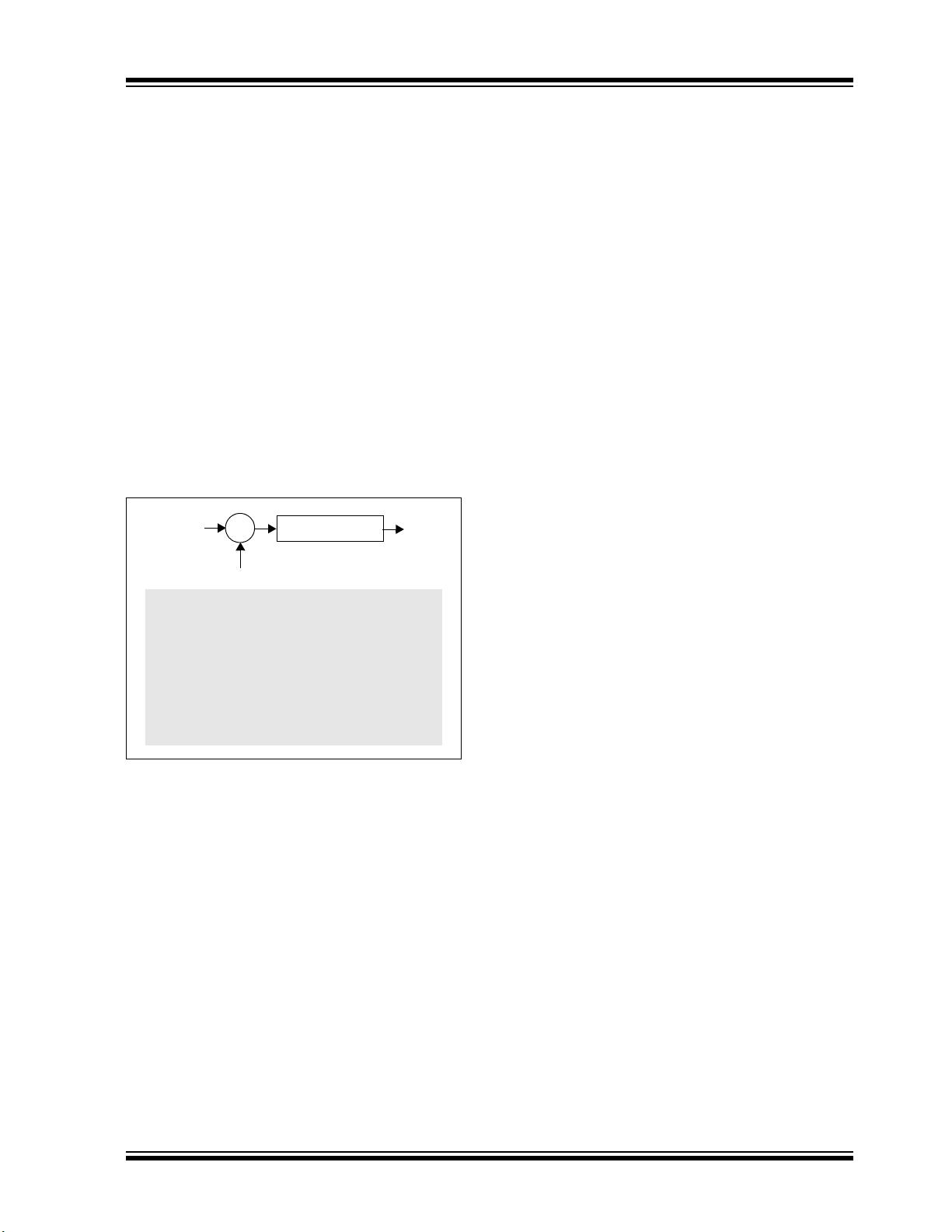
ACIM 设计为运行于恒定输入电压和频率条件下,但通
过改变电机输入电压频率的控制方法也可使 ACIM 有效
运行在开环变速的应用中。 如果电机不处于过载状态,
电机运行速度近似与输入频率成正比。当希望通过减小
驱动电压的频率以降低电机转速时,也应同时按比例减
小电压的幅值。否则,当输入频率较低时电机会出现过
电流。这种控制方法称为 “压频比控制”。
实际应用中,用户采用的电压 - 频率关系曲线应能确保
电机在任何速度设定点都能正常工作。该关系曲线可以
采用查找表的形式或通过实时计算的方式获得。实际应
用中通常使用一个斜率变量来定义任何运行点驱动频率
和电压之间的线性关系。可采用压 - 频比控制法,通过
速度和电流传感器,控制电机闭环运行。
压频比控制方法非常适用于风机和泵等负载变化较慢的
应用场合。但对于需要快速动态响应的应用场合则效果
不佳。特别是在速度或转矩发生快速变化时,由于较高
的转差率则会导致较大的瞬态电流。如果同时对电机转
矩和磁通进行闭环控制,则可以在不产生大电流的条件
下实现快速的动态响应。矢量控制技术可以实现上述目
标,通常也被称作磁场定向控制 (FOC)。
矢量控制的优点在于可以直接实现较低的能量消耗。这
样可实现更高的效率、较低的运行费用以及降低驱动元
件成本。
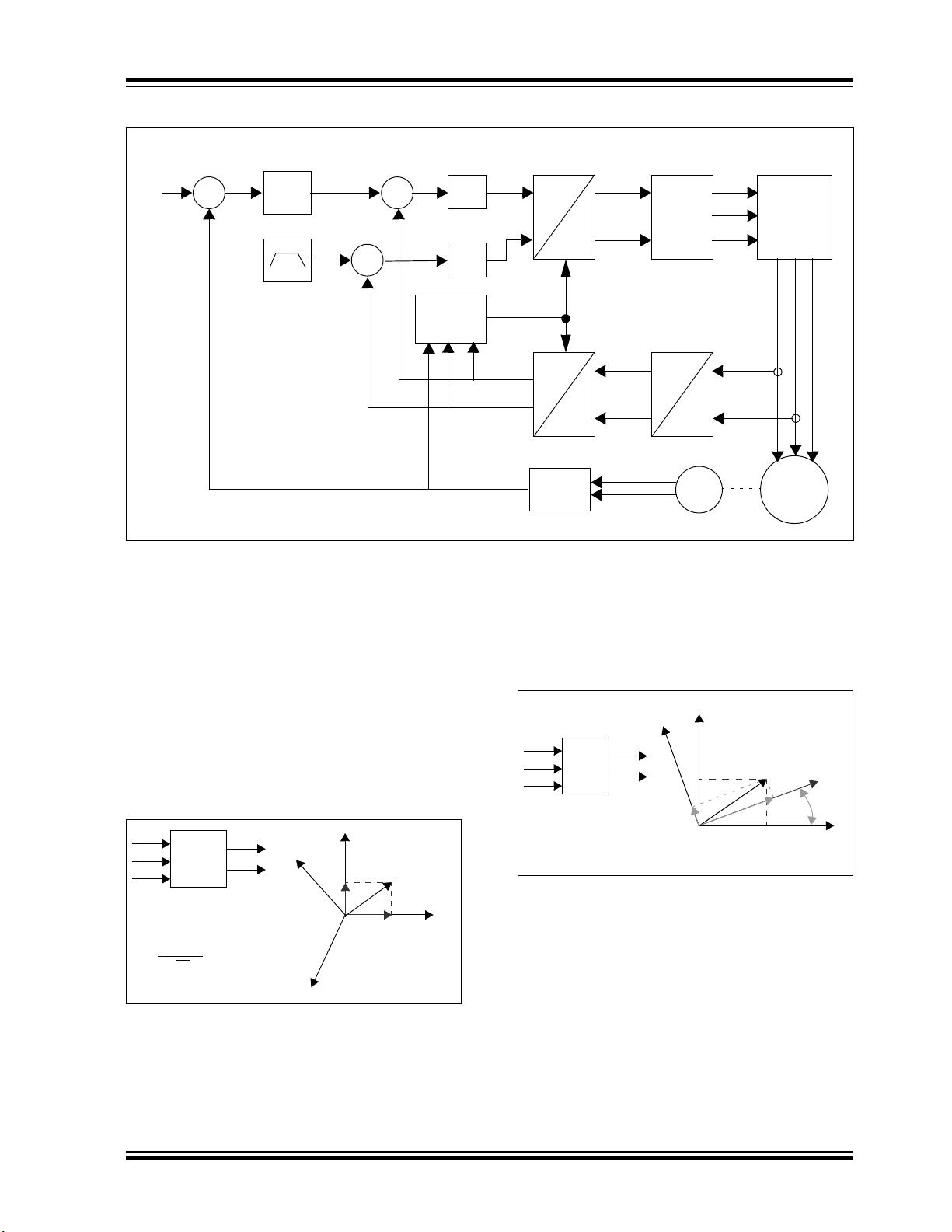
矢量控制
传统的控制方法,比如前面介绍的压频比控制,都是对
电机驱动电压的频率和幅值进行控制。与之相比,矢量
控制法则同时控制电机驱动电压的频率、幅值以及相
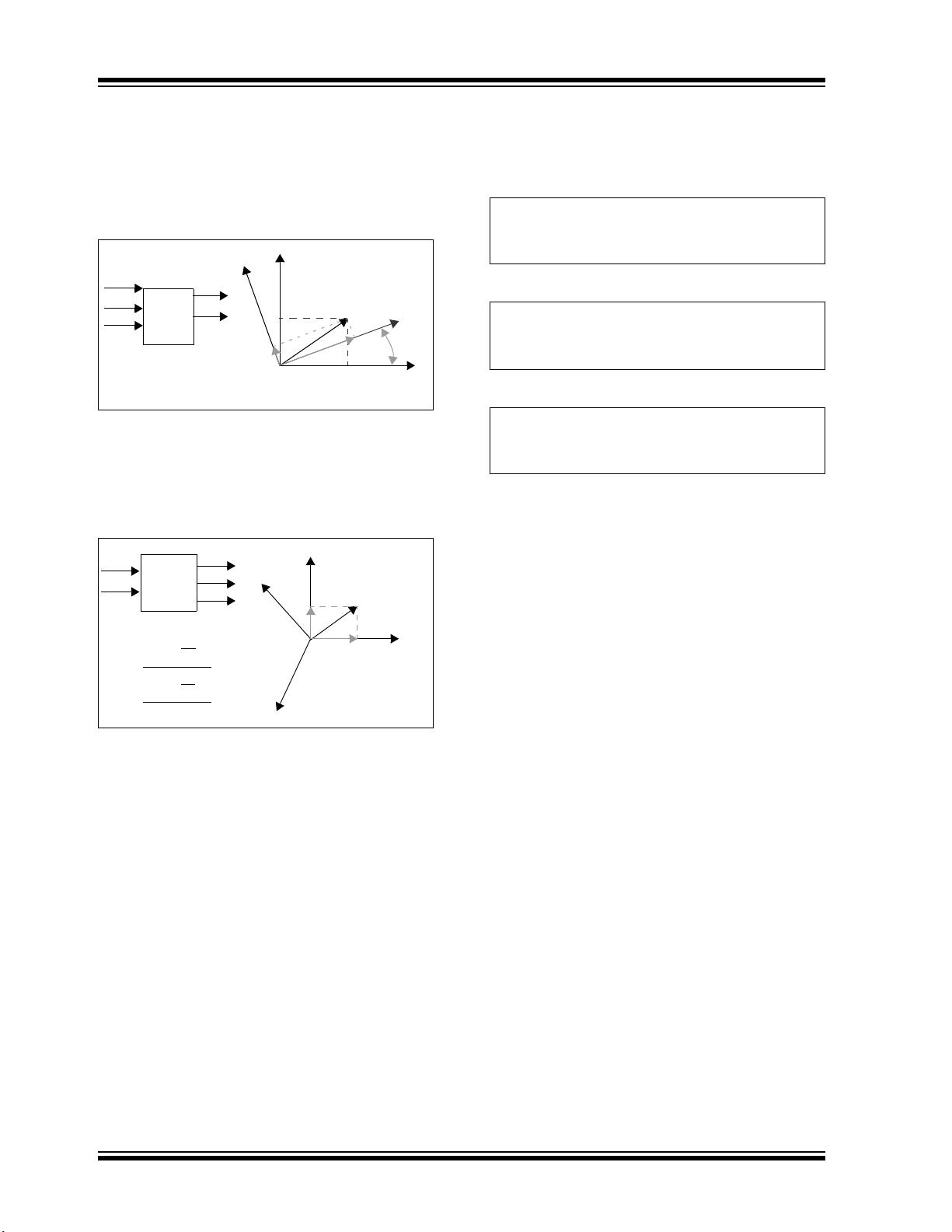
位。 矢量控制的关键在于产生一个三相电压矢量以控制
三相定子电流矢量。三相定子电流矢量可以控制转子磁
通矢量并最终控制转子电流矢量。
作者:
Dave Ross
和
John Theys
Diversified Engineering Inc.
第二作者:
Steve Bowling
Microchip Technology Inc.
使用 dsPIC30F 实现交流感应电机的矢量控制

剩余67页未读,继续阅读






评论4
最新资源